SPS
Grundeigenschaften
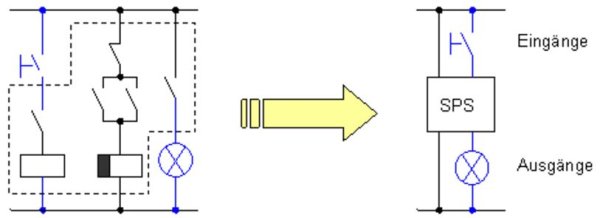
SPS bedeutet Speicherprogrammierbare Steuerung. Mit dieser Steuerung können grundsätzlich logische Verknüpfungen oder klar definierte Abläufe programmiert werden. Somit lassen sich fest verdrahtete Relais-Schaltungen vollkommen durch eine SPS ersetzen. Dabei ergeben sich grundlegende Vorteile wie die Platzeinsparung und eine hohe Flexibilität. Die Speisespannung für SPS-Anlagen beträgt in der Regel 24 Volt. In der Programmbibliothek stehen dem Anwender nebst der logischen Verknüpfungen (AND, OR, NAND, NOR, EXOR, etc) auch zeitgesteuerte Funktionen wie anzug- und abfallverzögerte Relais, Timer und Taktgeber. Durch die anwachsende Integrierung der SPS in die Automatisierungstechnik, übernimmt diese heutzutage auch Regelaufgaben, die mit analogen Signalrückführungen verbunden sind, wie beispielsweise eine Motordrehzahlregelung
 {.imgcenter}
{.imgcenter}
Bauformen
Es gibt von der Micro-, zur Mini- bis hin zur Rack-SPS. Je nach Baugrösse oder Komplexität des zu erstellenden Programms, kann das Programm direkt an der SPS-Einheit oder mit Hilfe einer SPS-Software am PC programmiert werden.
 {.imgcenter}
Bildquelle: www.Siemens.ch
{.imgcenter}
Bildquelle: www.Siemens.ch
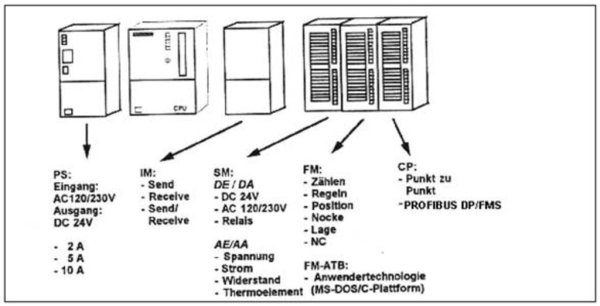
Die Flexibiltät der SPS-Steuerungen widerspiegelt sich auch in deren modularen Bauform. Das Netzteil und die CPU-Einheit bilden das Grundgerüst für eine Steuereinheit, die mit folgenden Modulen erweitert werden können:
- Digitale Eingangskarten (meist Potentialtrennung mittels Optokoppler)
- Digitale Ausgangskarten (offener Kollektor oder Relais)
- Analoge Eingangskarten
- Analoge Ausgangskarte
- Motorsteuerkarte
- Busmodule
- Netzwerkverbindung
etc.
 {.imgcenter}
{.imgcenter}
Aufbau und Funktionsweise
Programmabarbeitung:
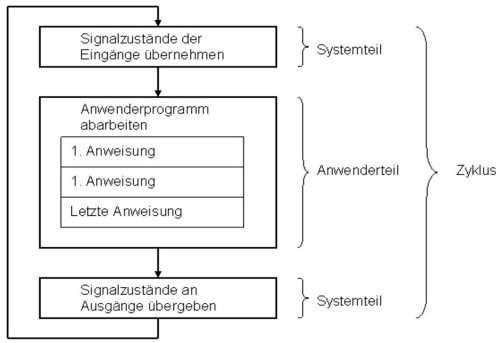
Das Programmbearbeitungsprinzip sieht folgendermassen. Das SPS-Programm wird zyklisch abgearbeitet. Pro Zyklus werden drei grundlegende Schritte ausgeführt. Als erstes legt die SPS das Eingangsabbild der Sensoren im Prozessabbild ab. Als nächstes werden aufgrund des Programms und des Eingangsbildes die Ausgänge neu definiert und somit ein Ausgangsabbild erstellt. Zuletzt im Zyklus wird das Ausgangs-Prozessabbild den Ausgängen übergeben.
Die Zykluszeit beträgt üblicherweise ca. 1/100 Sekunden. Je nach Programmlänge kann diese Zeit variieren. Durch die zyklische Abarbeitung des Programms hat die SPS eine Reaktionszeit, die maximal mit dem Zweifachen der Zykluszeit geschätzt werden kann. Der Grund ist: Eine Eingangsänderung, die erst unmittelbar nach dem Übernehmen des Eingansgabbildes erfolgt, wird erst am Anfang des nächsten Zyklus übernommen und bearbeitet.
 {.imgcenter}
{.imgcenter}
Programmiersprache:
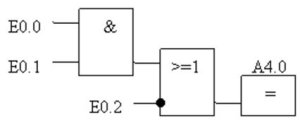
Für die Programmierung stehen dem Anwender drei Programmiersprachen zur Verfügung. Hier jeweils ein Beispiel zum gleichen Codeausschnitt:
AWL (Anweisungsliste)
 {.imgcenter}
{.imgcenter}
FUP (Funktionsplandarstellung)
 {.imgcenter}
{.imgcenter}
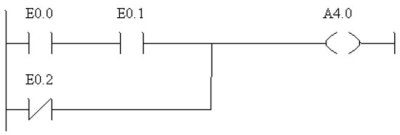
KOP (Kontaktplandarstellung)
 {.imgcenter}
{.imgcenter}
Kenngrössen
Speisespannung [V]:
Üblicherweise 24 Volt.
Bitverarbeitungsgeschwindigkeit [us]:
Programmspeicher [kB]:
Hunderte von kByte
Datenspeicher [kB]:
Hunderte von kByte
Anzahl digitale Ein- und Ausgänge:
Je nach SPS-Aufbau sehr unterschiedlich
Anzahl analoge Ein- und Ausgänge:
Je nach SPS-Aufbau sehr unterschiedlich
Anzahl Merker
Anzahl Timer
Anzahl Zähler
Kommunikationstechnologien:
Ja nach SPS-Aufbau sehr unterschiedlich
Ansteuerung
Die Ansteuerung einer SPS erfolgt üblicherweise über eine der seriellen Schnittstellen am Computer. Durch die anwachsende Vernetzung der Anlagen erlauben einige SPS auch einen Zugriff über TCP/IP, was eine Fernwartung ermöglicht.
Über die Ansteuerungssoftware können die momentanen Zustände der SPS abgerufen werden und beeinflusst werden oder eine Simulation des Programms durchgeführt werden. Dies setzt voraus dass die SPS-Hardwarekonfiguration der Software bekannt ist. Die ganze Hardwareprojektierung wird in der selben SPS-Software erstellt.
Anwendungsgebiete
Automatisierung
Allgemeine Steuerungen
Fertigungstechnik
Heiz- und Lüftungsanlagen
Literaturhinweise
- Automatisieren mit SPS, Theorie und Praxis, ISBN3-528-23910-7
Verbindungsmöglichkeiten SPS
| Sensortyp | Bemerkung zur Kombination |
|---|---|
| Kapazitiv | Direkt über digitale Eingänge einlesbar |
| Induktiv | Direkt über digitale Eingänge einlesbar |
| Magnetostriktiv | |
| Piezo | |
| Potentiometrisch | Direkt über analoge Eingänge einlesbar - Eingangswiderstand der SPS muss möglichst gross sein. |
| DMS | |
| Fotoelektrisch | Direkt über digitale Eingänge einlesbar |
| Ultraschall | Über analoge Eingänge oder Funktionsmodul einlesbar |
| Magnetisch | Direkt über digitale Eingänge einlesbar |
Verbindungsmöglichkeiten SPS
| Aktortyp | Bemerkung zur Kombination |
|---|---|
| Magnetostriktiv | |
| Piezo | |
| Synchronmotor | Über Funktionsmodul ansteuerbar |
| Asynchronmotor | Über Funktionsmodul ansteuerbar |
| Schrittmotor | Über Funktionsmodul ansteuerbar |
| Linearmotor | Über Funktionsmodul ansteuerbar |
| Tauchspulenmotor | Über analoge Ausgänge oder Reglerbaugruppe ansteuerbar |
| Smart-Materials |
Verbindungsmöglichkeiten SPS
| Identifikationstyp | Bermerkung zur Kombination |
|---|---|
| Barcode | Über Funktionsmodul ansteuerbar |
| 2D-Code | Über Funktionsmodul ansteuerbar |
| RFID | Über Funktionsmodul ansteuerbar |
| Magnetisch | Zur Zeit keine Kobmination bekannt |
| Bildverarbeitung | Über Funktionsmodul ansteuerbar |
| Elektro-Mechanisch | Über digitale Eingänge programmierbar |
Verbindungsmöglichkeiten SPS
| Kommunikationstyp | Bemerkung zur Kombination |
|---|---|
| ASI | Über Funktionsmodul ausführbar |
| CAN | Über Funktionsmodul ausführbar |
| Profibus | Über Funktionsmodul ausführbar |
| Industrial Ethernet / Profinet | Über Funktionsmodul ausführbar |