Synchron-Motor
Grundeigenschaften
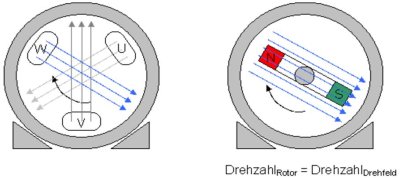
Der Synchronmotor besteht aus einem Stator und einem Rotor. Im Stator wird wie beim Asychronmotor ein Drehfeld erzeugt. Der Rotor (auch Polrad genannt), besitzt ein konstantes magnetisches Feld, welches dem Drehfeld im Stator folgt. Durch den Wegfall der Verluste zum Aufbau des Magnetfeldes im Rotor, haben Sychronmotoren sehr hohe Wirkungsgrade.

Bildquelle: www.baumueller.de
Das Drehfeld im Stator und das magnetische Feld im Rotor haben auch unter Belastung die gleiche Drehzahl, daher der Name Synchronmotor.
 {.imgcenter}
{.imgcenter}
Oder
 {.imgcenter}
{.imgcenter}
Bauformen
Die Bauformen der Synchronmotoren unterscheiden sich in ihrer Rotorform und werden wie folgt unterteilt:
Permanentmagnetläufer:
Der Permanentmagnetläufer besteht aus starken Permanentmagneten. Diese erzeugen das konstante magnetische Feld am Rotor.
Schleifringläufer:
Im Schleifringläufer werden an Stelle der Permanentmagnete Wicklungen angebracht, die ebenfalls ein konstantes magnetisches Feld erzeugen. Allerdings werden diese Wicklungen über Schleifringe mit einer Gleichspannung erregt.
Schrittmotor:
Ein Schrittmotor ist eine Sonderform eines Synchronmotors.
Linearmotor:
Ein Linearmotor ist eine aufgewickelte Form eines Schrittmotors, folglich ein Synchronmotor.
Elektronikmotor (Brushless DC-Motor):
Beim Elektronikmotor erzeugt ein interner Treiber das magnetische Drehfeld im Stator. Die Kommutation des Drehfeldes erfolgt somit ausserhalb des Motors. Meistens bildet der Motor mit dem Treiber eine in sich geschlossene Einheit.
DC-Motor (Brushed DC-Motor):
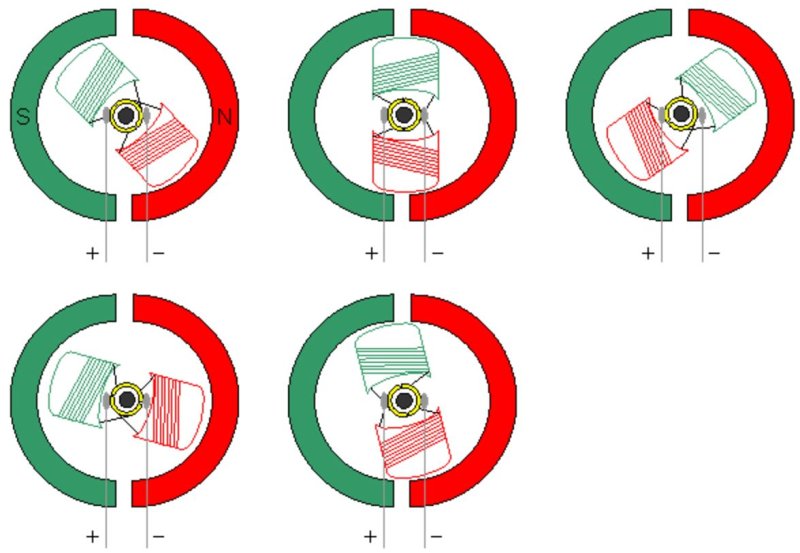
Der klassische DC-Motor mit Bürsten hat im Stator ein konstantes magnetisches Feld. Am Rotor wird durch Stromwender (Schleifkontakte aus Kohlenbürsten, auch Kommutator gennant) die Kommutation des Drehfeldes vorgenommen. Der Stromwender erregt fortlaufend die nächstgelegene Wicklung in Drehrichtung.
 {.imgcenter}
{.imgcenter}
Aufbau und Funktionsweise
Anlaufschwierigkeiten:
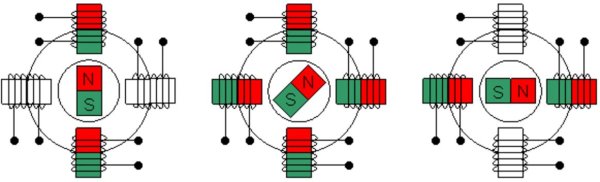
Beim Einschalten eines Sychronmotors dreht das Statorfeld entsprechend seiner Polzahl und der angelegten Netzfrequenz. Da das magnetische Feld im Rotor konstant ist, wird es sofort andauernd von den Gegenpolen im Stator angezogen und von den gleichartigen Polen abgestossen. Der Rotor kann aber wegen seiner Massenträgheit dem Statorfeld nicht direkt von Anfang an folgen. Der Motor braucht eine Anfahrhilfe, die meistens mit dem Hochfahren der Frequenz bewerkstelligt wird.
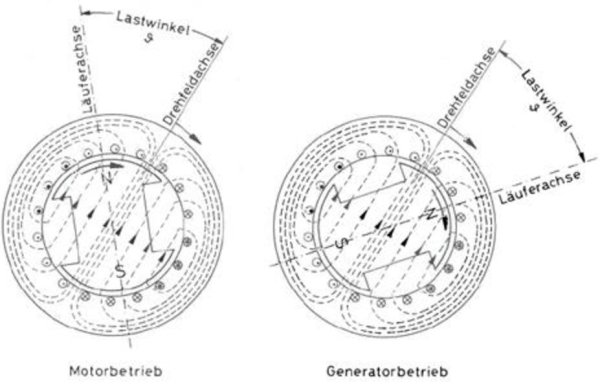
Lastwinkel:
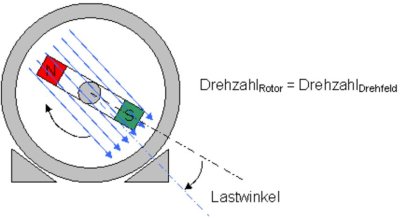
Der Lastwinkel beschreibt die Winkelverschiebung zwischen dem Drehfeldwinkel und dem Rotorwinkel. Im Leerlauf ist der Lastwinkel Null. Mit zunehmender Belastung wird der Lastwinkel immer grösser, sprich der Rotor hat die gleiche Drehzahl wie das Drehfeld, läuft aber dem Drehfeld um den Lastwinkel nach.
 {.imgcenter}
{.imgcenter}
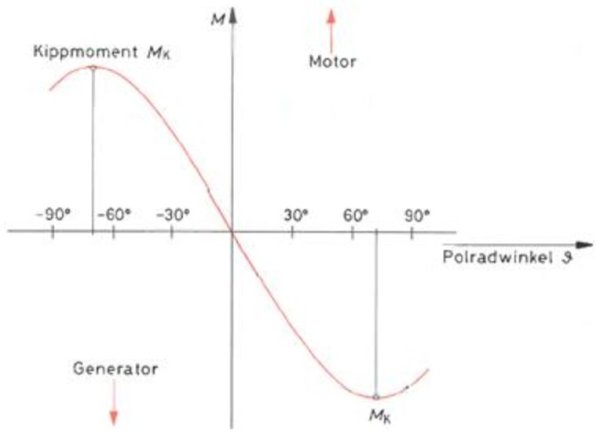
Kippmoment:
Synchronmotoren haben meistens ein Kippmoment, das doppelt so gross ist wie das Nennmoment. Wird der Motor über das Kippmoment hinaus belastet, löst sich die magnetische Verbindung zwischen Stator und Rotor. Folglich fällt der Rotor ausser Tritt und bleibt stehen. Dieses Phänomen kann bei Schrittmotoren (Sonderform eines Synchronmotors) gut beobachtet werden.
 {.imgcenter}
{.imgcenter}
 {.imgcenter}
{.imgcenter}
Bildquelle: Elektrische Antriebe, Werner Böhm, Vogel Fachbuch
Schaltungsarten: Die Schaltungsart eines Synchronmotors ist sehr bauformabhängig.
Kenngrössen
Drehzahl [U/min]:
Üblicherweise bis 9000 U/min
Nennspannung [V]:
k.A.
Nennstrom [A]:
Bis zu 200 Ampere
Nennmoment [Ncm]:
Das Drehmoment wird in Form einer Kennlinie angegeben. Wenn ein maximales Drehmoment im Datenblatt angegeben wird, dann entspricht dieses meistens dem Haltemoment im Stillstand.
Nennleistung [W]:
Von wenigen Watts bis zu 500kW
Poolpaarzahl:
Meistens drei.
Ansteuerung
Die Ansteuerung eines Synchronmotors ist abhängig von der Phasenzahl. Grundsätzlich müssen die Statorspulen (Wanderfeld) kontinuierlich so verschaltet, dass der Rotor die gewünschte Drehrichtung und Drehzahl erreicht. Diese Aufgabe übernimmt der passende Leistungstreiber. Als Input für die SOLL-Wertvorgaben können typischerweise analoge Spannungen angelegt werden. Teuere Modelle ermöglichen auch eine Anbindung an Kommunikationssystemen wie Profibus oder Ethernet.
Anwendungsgebiete
Automation
Modellflug
Druckmaschinen
Verpackungsmaschinen
Textilmaschinen
Kunststoffmaschinen
Handlingmaschinen
Sondermaschinen
allgemeiner Maschinenbau
Medizin- und Laborgeräte
Drehbare Werbung
Leuchtreklame
Grafische Lichtscheinwerfer
Getränkeautomaten
Büromaschinen
Spielautomaten
Pumpen
Warenautomaten
Grillantriebe
Literaturhinweise
- Mechatronik Komponenten Methoden Beispiele, ISBN 3-446-40599-2
- Elektrische Antriebstechnik, Siemens, ISBN 978-3-89578-308-1
Verbindungsmöglichkeiten Synchron-Motor
| Sensortyp | Bemerkung zur Kombination |
|---|---|
| Kapazitiv | Kann im Bereich der Drehzahlmessung oder zur Ermittlung einer Endanschlagsfahrt verwendet werden. |
| Induktiv | Kann im Bereich der Drehzahlmessung oder zur Ermittlung einer Endanschlagsfahrt verwendet werden. |
| Magnetostriktiv | Es können Auflösungen bis zu 1um gemessen werden. Typischerweise besitzen magnetostriktive Sensoren lineare Messwege ab von 25mm bis zu 7600mm. |
| Piezo | Nicht geeignet. |
| Potentiometrisch | Einget sich gut für lineare Bewegungen als Absolutpositionsgeber. Bei rotativen Bewegungen kann der Drehgeber nicht beliebige Umdrehungen in der selben Richtung ausführen. |
| DMS | Nicht geeignet. |
| Fotoelektrisch | Kann sowohl für Drehzahlmessungen, als auch für linearer absoluter Positionsgeber eingesetzt werden. |
| Ultraschall | Bei akustischen Systemen kann mit einer Aufslösung von 0.3mm gerechnet werden. Für hochdynamische Anwendungen nicht geeignet. |
| Magnetisch |
Verbindungsmöglichkeiten Synchron-Motor
| Controllertyp | Bemerkung zur Kombination |
|---|---|
| ASIC | Kann über eine Leistungselektronik oder Treiber angesteuert werden. |
| SPS | Kann über eine Leistungselektronik oder Treiber angesteuert werden. |
| Prozessrechner | Kann über eine Leistungselektronik oder Treiber angesteuert werden. |
| Microcontroller | Kann über eine Leistungselektronik oder Treiber angesteuert werden. |
| Industrie-PC | Kann über eine Leistungselektronik oder Treiber angesteuert werden. |
Verbindungsmöglichkeiten Synchron-Motor
| Identifikationstyp | Bermerkung zur Kombination |
|---|---|
| Barcode | Zurzeit keine Kombination bekannt |
| 2D-Code | Zurzeit keine Kombination bekannt |
| RFID | Zurzeit keine Kombination bekannt |
| Magnetisch | Zurzeit keine Kombination bekannt |
| Bildverarbeitung | Zurzeit keine Kombination bekannt |
| Elektro-Mechanisch | Zurzeit keine Kombination bekannt |
Verbindungsmöglichkeiten Synchron-Motor
| Kommunikationstyp | Bemerkung zur Kombination |
|---|---|
| ASI | Kommuniziert in der Regel über den ASI-Bus mit einer SPS. Dabei werden hauptsächlich binäre und durch Erweiterungen auch analoge Werte übertragen. |
| CAN | Mit einer digitalen Schnittstelle können die Daten über einen CAN-Bus weitergeleitet werden. Somit bleiben grosse Kabelbäume erspart. |
| Profibus | Mit einer digitalen Schnittstelle können die Steuerdaten über einen Profibus weitergeleitet werden. Vor allem ürsprünglich analoge Signale können ohne Einflüsse wie Spannungsabfall oder Induzierte Spannungen über weite Distanzen trasportiert werden. |
| Industrial Ethernet / Profinet | Mit dem industrial Ethernet können Steuersignale über grosse Distanzen transportiert werden. Somit können Aktoren ferngesteuert und ferngewartet werden. |