Magnetostriktiv
Grundeigenschaften
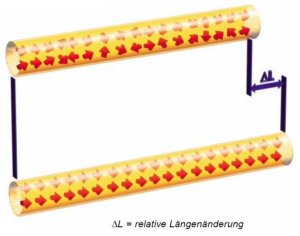
Bringt man z.B. einen Stab aus ferromagnetischem Material in ein Magnetfeld, das parallel zur Längsrichtung des Stabes verläuft, so erfährt dieser Stab eine mechanische Längenänderung. Die relative Verlängerung, die durch einen magnetostriktiven Effekt, den Joule-Effekt, erzielt werden kann, ist in der Realität sehr klein und beträgt ca. 10-6mm.!
Die Magnetostriktion eignet sich am ehesten für absolute lineare Positionsmessungen. Das industriell realisierte Messprinzip nutzt den magnetostriktiven Wiedemann-Effekt. Er beschreibt die mechanische Torsion eines langen, dünnen ferromagnetischen Stabes, der sich in einem externen longitudinalen Magnetfeld befindet und gleichzeitig von einem elektrischen Strom durchflossen wird, welcher ein konzentrisches Magnetfeld erzeugt.
Der Wiedemann-Effekt bewirkt durch das Aufeinandertreffen zweier Magnetfelder die mechanische Verdrehung (Torsion) eines ferromagnetischen Stabes, der von einem elektrischen Strom durchflossen wird.
Als magnetoelastischer Effekt findet der Villary-Effekt Anwendung im MTS-Messverfahren. Er behandelt die Änderung der longtidualen magnetischen Eigenschaften, z.B. der Permeabilität eines ferromagnetischen Stabs, die durch seine Verformung in Längsrichtung hervorgerufen werden.

Bauformen
Wellenleiter im Gehäuse untergebracht. Flacher externer Magnet.

Magnet umschliesst starren Wellenleiter.

Magnet umschliesst flexiblen Wellenleiter.

Bildquelle: www.mtssensor.de
Aufbau und Funktionsweise
Das Messsystem besteht aus diesen fünf wesentlichen Bestandteilen:
- Messelement (Wellenleiter)
- Sensorelektronik
- Positionsgebender Permanentmagnet
- Torsionsimpulswandler
- Dämpfung am Ende des Wellenleiters
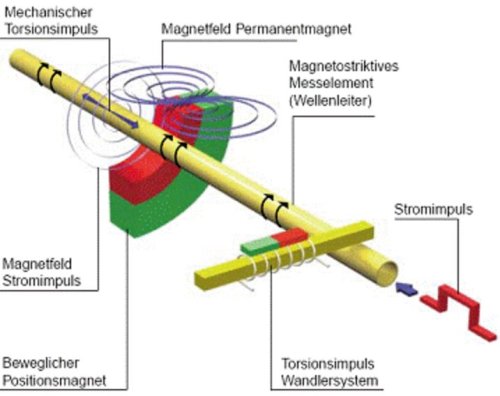
Messvorgang: Kernstück des Systems ist das ferromagnetische Messelement, auch als Wellenleiter bezeichnet, weil es als Leiter für die torsionale Körperultraschallwelle zum Impulswandler dient.
Kernstück des Systems ist das ferromagnetische Messelement, auch als Wellenleiter bezeichnet, weil es als Leiter für die torsionale Körperultraschallwelle zum Impulswandler dient.
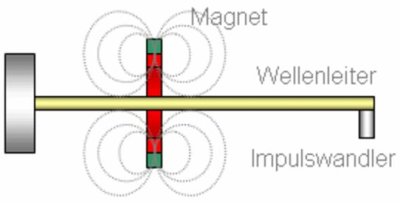
Die zu messende Position wird durch einen beweglichen Dauermagneten markiert, der den Wellenleiter umschließt. Dieser Positionsmagnet erzeugt im Wellenleiter das magnetische Längsfeld und ist starr mit dem Objekt verbunden, dessen Position bestimmt werden soll.
Vorteilhaft ist hierbei, dass zwischen Positionsgeber (Magnet) und Messelement (Wellenleiter) eine völlige mechanische Entkopplung besteht. Dieses berührungslose Messprinzip arbeitet vollkommen verschleissfrei.
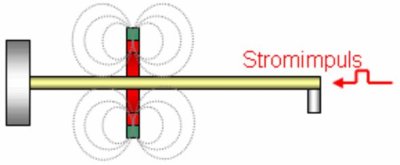
Zur eigentlichen Messung wird ein kurzer Stromimpuls aus der Sensorelektronik durch den Wellenleiter geschickt.
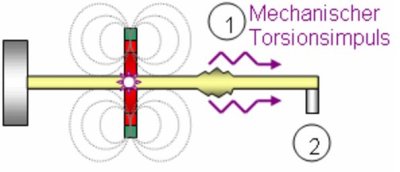
Dadurch entsteht ein zweites veränderliches Magnetfeld radial um den Wellenleiter herum. Im Bereich des Positionsmagneten findet auf Grund der Überlagerung beider Magnetfelder (gemäß des Wiedemann- Effekts) eine elastische, torsionale Verformung des magnetostriktiven Wellenleiters statt.
Dadurch tretet im Feld des Positionsmagneten eine Torsionswelle aus . Als Körper-Ultraschallwelle läuft sie vom Entstehungsort zu den Enden des Wellenleiters und wird am unteren Ende vollständig absorbiert. Die für die Messung relevante Detektion der Torsionswelle geschieht am oberen Ende des Wellenleiters, in einem speziellen Impulswandler-System.
Dieser besteht aus einem quer mit dem Wellenleiter verbundenen, ebenfalls magnetostriktiven Metallstreifen, einer induktiven Detektionsspule und einem weiteren, ortsfesten Permanentmagneten. Im Torsionsimpulswandler bewirkt die Körperschallwelle (Torsionswelle) eine Permeabilitätsänderung des Metallstreifens nach dem Gesetz von Villary. Die daraus resultierende zeitliche Änderung des Permanentmagnetfeldes induziert in der Abtastspule einen elektrischen Strom. Dieses nun elektrische Antwortsignal wird von der nachgeschalteten Elektronik verarbeitet.
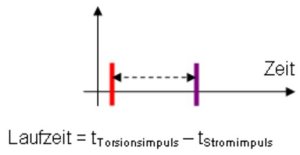
Die torsionale Körperschallwelle läuft mit konstanter Ultraschallgeschwindigkeit durch den Wellenleiter. Die genaue Ortsbestimmung ergibt sich durch eine Laufzeitmessung bei der die Magnetposition aus der Zeit zwischen dem Start des Stromimpulses und dem Eintreffen des elektrischen Antwortsignals, der im Torsionswandler detektierten Körperschallwelle, bestimmt wird.
Kenngrössen
Messlänge [mm]
Die Messlänge beträgt zwischen 25 und 7600mm.
Auflösung [μm]
Die Auflösung beträg zwischen 1 und 10 μm
Wiederholrate [kHz]
Liegt bei ca. 1kHz
Ansteuerung
Das Auslesen der Daten kann durch folgende Schnittstellen geschehen:
- Analoges Spannungsignal 0 bis 10Volt, -10 bis +10Volt
- Gray- oder Binärformat
- FeldBusse: CANbus, Profibus, EtherCAT
Anwendungsgebiete
Automobilindustrie
Füllstandsmessungen
Positionsmessungen
Literaturhinweise
Verbindungsmöglichkeiten magnetostriktiver Sensor
| Aktortyp | Bemerkung zur Kombination |
|---|---|
| Magnetostriktiv | Eignet sich bei linearen Bewegungen als absoluter Positionsgeber. Verschleisslose Positionsermittlung. Magnet muss mit bewegtem Objekt verbunden sein. |
| Piezo | Eignet sich bei linearen Bewegungen als absoluter Positionsgeber. Verschleisslose Positionsermittlung. Magnet muss mit bewegtem Objekt verbunden sein. |
| Synchronmotor | Eignet sich bei linearen Bewegungen als absoluter Positionsgeber. Verschleisslose Positionsermittlung. Magnet muss mit bewegtem Objekt verbunden sein. |
| Asynchronmotor | Eignet sich bei linearen Bewegungen als absoluter Positionsgeber. Verschleisslose Positionsermittlung. Magnet muss mit bewegtem Objekt verbunden sein. |
| Schrittmotor | Eignet sich bei linearen Bewegungen als absoluter Positionsgeber. Verschleisslose Positionsermittlung. Magnet muss mit bewegtem Objekt verbunden sein. |
| Linearmotor | Eignet sich bei linearen Bewegungen als absoluter Positionsgeber. Verschleisslose Positionsermittlung. Magnet muss mit bewegtem Objekt verbunden sein. |
| Tauchspulenmotor | Eignet sich bei linearen Bewegungen als absoluter Positionsgeber. Verschleisslose Positionsermittlung. Magnet muss mit bewegtem Objekt verbunden sein. |
| Smart-Materials |
Verbindungsmöglichkeiten magnetostriktiver Sensor
| Controllertyp | Bemerkung zur Kombination |
|---|---|
| ASIC | Integrierte Schaltung kann gut an Sensor angepasst werden. |
| SPS | Als relativer Positionsgeber eher unüblich, weil Quadratursignal muss interpretiert werden muss. |
| Prozessrechner | Sensorsignal wird üblicherweise über eine digitale Schnittstelle eingelesen. Quadratursignal muss interpretiert werden können. |
| Microcontroller | Sensorsignal wird üblicherweise über eine digitale Schnittstelle eingelesen. Quadratursignal muss interpretiert werden können. Der Signalpegel muss unter Umständen auf 3.3Volt begrenzt werden. |
| Industrie-PC | Sensorsignale kann über geeignete Schnittstelle eingelesen werden. Signalamplitude muss angepasst werden. Quadratursignal muss interpretiert werden können. |
Verbindungsmöglichkeiten magnetostriktiver Sensor
| Identifikationstyp | Bermerkung zur Kombination |
|---|---|
| Barcode | |
| 2D-Code | |
| RFID | Es gibt Ansätze für RFID-Tags, die über einen Sensoreingang Sensorwerte speichern können. Somit werden bei einem Identifikationsvorgang auch Attribute wie beispielsweise Maximal-, Minimal- oder Durchschnittssensorwerte übertragen. |
| Magnetisch | |
| Bildverarbeitung | |
| Elektro-Mechanisch |
Verbindungsmöglichkeiten magnetostriktiver Sensor
| Kommunikationstyp | Bemerkung zur Kombination |
|---|---|
| ASI | Kommuniziert in der Regel über den ASI-Bus mit einer SPS. Dabei werden hauptsächlich binäre und durch Erweiterungen auch analoge Werte übertragen. Für die Übertragung von Quadratursignalen ist auch ein Erweiterungsmodul notwendig. |
| CAN | Mit einer digitalen Schnittstelle können die Sensordaten über einen CAN-Bus weitergeleitet werden. Somit bleiben grosse Kabelbäume erspart. Für die direkte Übertragung von Quadratursignalen ist es nicht geeignet. |
| Profibus | Mit einer digitalen Schnittstelle können die Sensordaten über einen Profibus weitergeleitet werden. Vor allem ürsprünglich analoge Signale können ohne Einflüsse wie Spannungsabfall oder Induzierte Spannungen über weite Distanzen trasportiert werden. |
| Industrial Ethernet / Profinet | Mit dem industrial Ethernet können Sensorsignale über grosse Distanzen transportiert werden. Somit können Sensoren ferngesteuert und ferngewartet werden. Für die direkte Übertragung von Quadratursignalen ist es nicht geeignet. |