Ultraschall
Grundeigenschaften
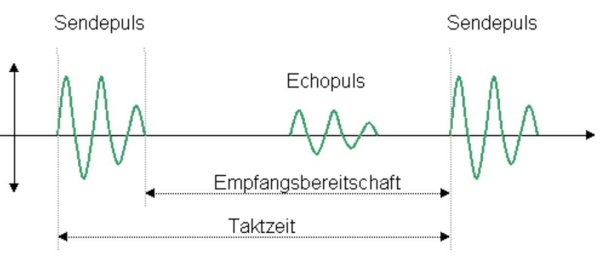
Ultraschallsensoren im Reflektionsverfahren senden eine Schallwelle aus und messen die Zeit, die deren Echo-Welle für die Rückkehr benötigt. Da die Schallgeschwindigkeit bekannt ist kann aus der gemessenen Laufzeit auf die Entfernung des reflektierenden Körpers zurückgeschlossen werden. Der Schall wird durch ein Piezoelement mit Membrane erzeugt. Die Messung des Echosignals erfolgt im Reflektionsverfahren mit dem gleichen Piezoelement, indem rückwirkend der direkte Piezoeffekt genutzt wird.
 {.imgcenter}
{.imgcenter}
Die Schallfrequenz ist für das menschliche Ohr nicht hörbar und beträgt typischerweise 100 bis 300 kHz.
 {.imgcenter}
{.imgcenter}
Der Schall breitet sich nur mit Hilfe eines Mediums (z.B. Luft, Gas, Flüssigkeit) aus. Je nach Dichte des Medium variiert die Schallgeschwindigkeit. Die Temperatur eines Mediums hat auch einen Einfluss auf die Schallgeschwindigkeit. Diese Faktoren müssen bei der Auswertung der Laufzeit berücksichtigt werden. Ultraschallsensoren haben den Vorteil transparente, glatte, poröse, ebene oder runde Objekte zu erfassen. Die Farben und Lichtverhältnisse der Reflektierenden Oberfläche spielen keine Rolle. Auch Objekte in flüssigem oder pulverförmigem Zustand können erfasst werden. Dies wird erreicht indem vom Sensor verschiedene Frequenzen ausgestrahlt werden. Denn jede Oberflächenbeschaffenheit besitzt eine Frequenz, welche sie am Besten reflektiert. Zu den Schall absorbierenden Materialien (nichtreflektierend) gehören Schaumgummi, Baumwolle, Wolle, Stoffe, Filze und sehr poröse Materialien.
Reflektion:
Eine grosse Problematik im Umgang mit Ultraschallsensoren sind Störeinflüsse verursacht durch Reflektionen der Schallwellen.
 {.imgcenter}
{.imgcenter}
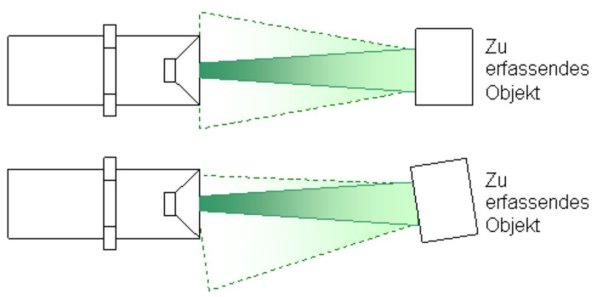
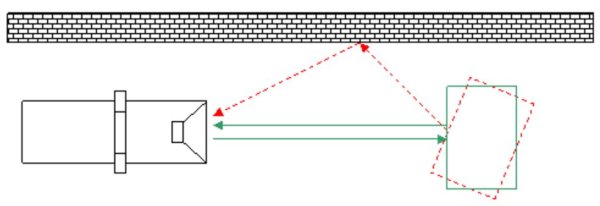
Im Idealfall wird eine Schallwelle von einer zu ihr senkrecht stehenden Fläche reflektiert. Somit legen die ausgesandte Welle und deren Echo die gleiche Strecke zurück. Im Störfall (beispielsweise wenn die reflektierende Fläche nicht senkrecht zur Welle steht), wird das Echosignal über umliegende Flächen reflektiert. Durch den Umweg des Echosignals verfälscht sich die Laufzeit des Signals in Bezug auf die Distanz des Objektes. Durch Anbringen von mehreren Ultraschallempfängern können reflektierte Schallwellen detektiert werden und Rückschlüsse aus der Situation gezogen werden (Emissionsverfahren). Dieser Nachteil der Reflektion kann aber auch gezielt ausgenutzt werden. Eine Abstandsmessung kann auch über einen Reflektor erfolgen. Dieser sollte allerdings mittels einer glatten Oberfläche möglichst gut reflektieren.
Temperatureinflüsse:
Ein grosser Nachteil für Ultraschallsensoren sind rasche Temperaturschwankungen auf der Schallstrecke, die nicht von der Auswertelektronik berücksichtigt werden können (Temperaturdrift). Auch turbulente Luftzustände beeinträchtigen den Ultraschall. Diese kommen auf der Oberfläche von sehr heissen Objekten zum Vorschein.
Luftströmung:
Durch sehr starke Luftströme kann die Schallkeule abgelenkt werden.
Doppler-Effekt:
Auch Dopplereffekte beeinträchtigen die Auswertung des Signals. Wenn zwischen dem Sensor und dem Objekt eine zu grosse Relativgeschwindigkeit besteht, verändert sich die Echofrequenz aufgrund des Dopplereffekts so stark, dass der Sensor die veränderte Frequenz nicht mehr wahr nimmt oder interpretieren kann.
Flüssige Medien:
In Flüssigkeiten werden Messungen mit Ultraschallsensoren durch Blasenbildung erschwert oder sogar verunmöglicht.
Letztendlich ist zu erwähnen, dass ein Ultraschallsensor nebst der Laufzeit auch die Phase, Frequenz und Amplitude des Signals misst.
Bauformen
Sender- Empfängerprinzipien:
Mit Ultraschallsensoren können nicht nur Abstandsmessungen durchgeführt werden. Durch geschickte Kombinationen der Funktionsprinzipien von Sender und Empfänger sowie durch Berücksichtigung von Phase, Frequenz und Amplitude, können auch folgende Messungen durchgeführt werden:
- Temperatur-
- Druck-
- Füllstands-
- Durchfluss-
- und Vibrationsmessungen.
Die untenstehende Tabelle zeigt zu jedem Verfahren die möglichen Anwendungen.
| Verfahren | Parameter | Anwendung | |
|---|---|---|---|
| Reflektion |  |
Laufzeit, Phase, Frequenz, Amplitude | Abstand, Füllstand, Position, Schallgeschwindigkeit, Objektstruktur und Anwesenheit, Dichte, Viskosität, Konzentration, Bewegung, Geschwindigkeit (Doppler Effekt), Volumenstrom |
| Transmissions-Verfahren |  |
Laufzeit, Phase, Amplitude | Abstand, Konzentration in Mehrkomponentensystemen, Partikelgrößenverteilung in Suspensionen und Emulsionen, Volumen- und Massenstrom, Geschwindigkeit, Dichte, Viskosität, Temperatur |
| Emissionsverfahren |  |
Amplitude, Frequenz | Prozessbeobachtung, Erfassung von Schallablenkungen |
| Resonanzverfahren |  |
Amplitude, Frequenz | Masse, Viskosität, Viskoelastizität, Dichte, Analyse (Chemie, Biologie), Mehrkomponentenanalyse |
Aufbau und Funktionsweise
Schaltungsarten
Schaltausgang / analog Ausgang:
Grundsätzlich werden in mechatronischen Anwendungen Ultraschallsensoren mit einem Schaltausgang oder analogem Ausgang verwendet.
Beim Schaltausgang wird mittels eines Potentiometers eine Schaltschwelle für eine bestimmte Laufzeit, sprich eine Distanz, eingestellt. Wird diese Schaltschwelle über- oder unterschritten, so wird ein entsprechendes Signal vom Sensor abgegeben.
Beim analogen Ausgang wird der messbare Bereich auf eine Spannung von 0 bis x Volt abgebildet. Je nach Intelligenz des Sensors kann der Messbereichs-Start- und Endwert programmiert werden.
Kenngrössen
 {.imgcenter}
{.imgcenter}
Erfassungsbereich [mm]:
Nominal, Standardversionen mm 20-5000
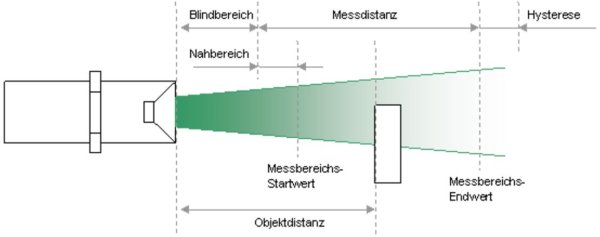
Blindbereich [mm]:
Innerhalb des Blindbereichs ist keine reproduzierbare Auswertung möglich. Objekte im Blindbereich können zu Fehlfunktionen des Sensors führen. Typischer Blindbereich 0-20mm.
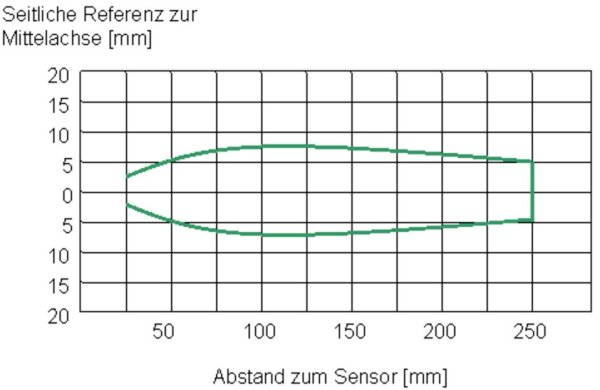
Schallkeule:
Die Schallkeule wird anhand eines Diagramms dargestellt.
 {.imgcenter}
{.imgcenter}
Einstellbereich des Schaltausgangs [mm]:
Mit Potentiometer 20-5000
Hysterese des Schaltpunktes [%]:
Beim Reflektionsverfahren: Nach erfolgter Objekterkennung wird die Messdistanz in axialer Richtung um den Hysteresewert erweitert.
Transmissionsverfahren: Nähert sich ein Objekt in radialer Richtung in die Schallkeule, definiert die Hysterese die Differenz zwischen Einschaltpunkt und Ausschaltpunkt. Das heisst, verlässt das Objekt die Schallkeule, so schaltet das Sensorsignal erst ab, wenn sich das Objekt in radialer Richtung am Einschaltpunkt um die Hysterese entfernt hat.
Auflösung [%], [mm]
Je nach Arbeitsbereich zwischen 0.3 und 5mm
Linearitätsabweichung [%]:
±0.5%
Temperaturfehler [%]:
–20...+50°C \<1%
Genauigkeit im ganzen Temperaturbereich [%]:
±1%
Sendefrequenz [kHz]:
~180 ~150 ~120 ~80 kHz
Wiederholgenauigkeit [%], [mm]:
Abweichung zwischen zweier Messungen unter gleichen Bedingungen.
Ansprechzeit ton [ms]:
Die Ansprechzeit definiert die Zeitdauer vom Eintreffen einer Schallwelle bis zur Reaktion des Sensors (Ausgangssignal).
Abfallzeit toff [ms]:
Die Abfallzeit definiert die Zeitdauer vom plötzlichen Abklingen einer Schallwelle bis zur Reaktion des Sensors (Ausgangssignal).
Sensortemperatur [°C]:
Üblicherweise zwischen -20°C und +70°C
Spannungsbereich [V]:
Üblicherweise zwischen 15 und 30 Volt
Temperaturgang der Luftstrecke [°C/K]:
Beispielsweise -0.17 bedeutet: Bei steigender Lufttemperatur sinkt der Messwert
Ansteuerung
In der Regel verfügen Ultraschallsensoren über Drehregler, mit denen der Arbeitsbereich oder der Schaltabstand eingestellt werden kann. Grosse Sensoren können via serielle PC-Schnittstelle konfiguriert werden. Filterwerte und Temperaturkompensationen können meist ebenfalls verändert werden.
Anwendungsgebiete
Siehe unter Bauformen
Literaturhinweise
- Mechatronik Komponenten Methoden Beispiele, ISBN 3-446-40599-2
- Ultraschallsensoren für die Prozesstechnik, Alf Püttmer und Edmund Linzenkirchner, Siemens AG, Peter Hauptmann,Otto-von-Guericke Universität Magdeburg
Verbindungsmöglichkeiten Ultraschallsensor
| Aktortyp | Bemerkung zur Kombination |
|---|---|
| Magnetostriktiv | |
| Piezo | Eignet sich bei linearen Bewegungen als Absolutgeber. Kann auch für Drehzahlerfassungen eingesetzt werden. Berührungslose Positionsermittlung. Problematisch wenn Flüssikeiten im Spiel sind. |
| Synchronmotor | Eignet sich bei linearen Bewegungen als Absolutgeber. Kann auch für Drehzahlerfassungen eingesetzt werden. Berührungslose Positionsermittlung. Problematisch wenn Flüssikeiten im Spiel sind. |
| Asynchronmotor | Eignet sich bei linearen Bewegungen als Absolutgeber. Kann auch für Drehzahlerfassungen eingesetzt werden. Berührungslose Positionsermittlung. Problematisch wenn Flüssikeiten im Spiel sind. |
| Schrittmotor | Eignet sich bei linearen Bewegungen als Absolutgeber. Kann auch für Drehzahlerfassungen eingesetzt werden. Berührungslose Positionsermittlung. Problematisch wenn Flüssikeiten im Spiel sind. |
| Linearmotor | Eignet sich bei linearen Bewegungen als Absolutgeber. Berührungslose Positionsermittlung. Problematisch wenn Flüssikeiten im Spiel sind. |
| Tauchspulenmotor | Eignet sich bei linearen Bewegungen als Absolutgeber. Berührungslose Positionsermittlung. Problematisch wenn Flüssikeiten im Spiel sind. |
| Smart-Materials |
Verbindungsmöglichkeiten Ultraschallsensor
| Controllertyp | Bemerkung zur Kombination |
|---|---|
| ASIC | Integrierte Schaltung kann gut an Sensor angepasst werden. |
| SPS | Kann üblicheweise direkt über digitales Modul eingelesen werden. |
| Prozessrechner | Sensorsignal wird üblicherweise über eine digitale oder analoge Schnittstelle eingelesen. |
| Microcontroller | Sensorsignal kann sowohl als digitales oder als anlaloges Signal eingelesen werden. Der Signalpegel muss unter Umständen auf 3.3Volt begrenzt werden. |
| Industrie-PC | Sensorsignale kann über geeignete Schnittstelle eingelesen werden. Signalamplitude muss angepasst werden. |
Verbindungsmöglichkeiten Ultraschallsensor
| Identifikationstyp | Bermerkung zur Kombination |
|---|---|
| Barcode | |
| 2D-Code | |
| RFID | Es gibt Ansätze für RFID-Tags, die über einen Sensoreingang Sensorwerte speichern können. Somit werden bei einem Identifikationsvorgang auch Attribute wie beispielsweise Maximal-, Minimal- oder Durchschnittssensorwerte übertragen. |
| Magnetisch | |
| Bildverarbeitung | |
| Elektro-Mechanisch |
Verbindungsmöglichkeiten Ultraschallsensor
| Kommunikationstyp | Bemerkung zur Kombination |
|---|---|
| ASI | Kommuniziert in der Regel über den ASI-Bus mit einer SPS. Dabei werden hauptsächlich binäre und durch Erweiterungen auch analoge Werte übertragen. |
| CAN | Mit einer digitalen Schnittstelle können die Sensordaten über einen CAN-Bus weitergeleitet werden. Somit bleiben grosse Kabelbäume erspart. |
| Profibus | Mit einer digitalen Schnittstelle können die Sensordaten über einen Profibus weitergeleitet werden. Vor allem ürsprünglich analoge Signale können ohne Einflüsse wie Spannungsabfall oder Induzierte Spannungen über weite Distanzen trasportiert werden. |
| Industrial Ethernet / Profinet | Mit dem industrial Ethernet können Sensorsignale über grosse Distanzen transportiert werden. Somit können Sensoren ferngesteuert und ferngewartet werden. |