Linear-Motor
Grundeigenschaften
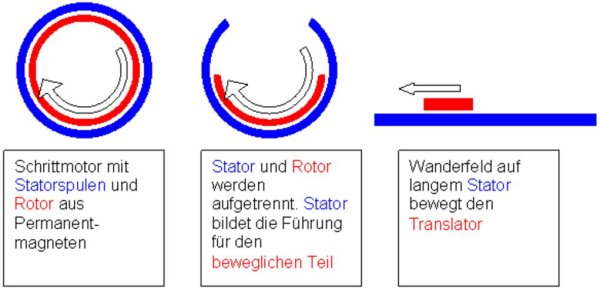
Der Linearmotor gehört elektrisch gesehen zur Familie der Synchronmotoren und mechanisch gesehen zu den Direktantrieben. Diese Sonderung macht aus dem Linearmotor einen Aktor mit geringem Platzbedarf, hoher Genauigkeit, hoher Dynamik und einer leisen und verschleissfreien Arbeitsweise. Prinzipiell kann man sich darunter ein aufgewickelter Synchron-Schrittmotor vorstellen, bei dem beispielsweise ein wanderndes elektrisches Feld in den Statorspulen, den Translator in eine lineare Bewegung versetzt.
 {.imgcenter}
{.imgcenter}
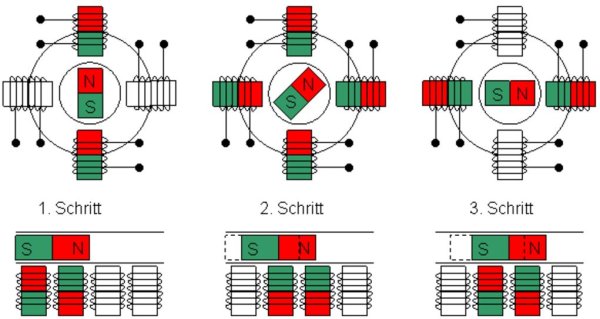
Diese Funktionsweise kann in einem vereinfachten Modell veranschaulicht werden: Der Translator (auch Glider oder Slider genannt) bestehe aus einem oder mehreren Permanentmagneten. Der Stator besitzt in diesem Beispiel einseitig vier Spulen. Was zum Beispiel in einem Schrittmotor zu einer Rotationsbewegung führt, wird im Linearmotor linear umgesetzt.
 {.imgcenter}
{.imgcenter}
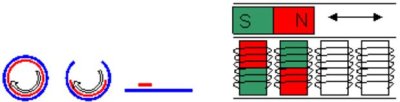
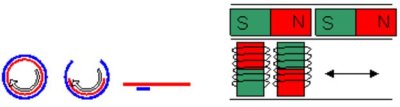
Damit sich der Translator nicht ruckartig von Schritt zu Schritt bewegt, werden für das Wanderfeld die Spulen nicht nur ein oder ausgeschaltet, sondern mit einer sinusförmigen Spannung angeregt. Dies Führt zu einer sehr gleichmässigen Bewegung. Die Positionserfassung für den Translator erfolgt in den meisten Fällen mit einem internen Hall-Sensor oder einem Linearsensor.
Bauformen
Langstator:
In den obigen Erklärungen wurde verständnishalber ein Langstator-Linearmotor veranschaulicht. Bei diesem bildet wie es der Name vermuten lässt, der Stator mit den Spulen die Führungsbahn. Der Translator besteht aus den Permanentmagneten. Diese Bauform eignet sich eher für kleine Hübe und findet ihre Anwendung bei den tubularen Linearmotoren.
 {.imgcenter}
Tubular:
{.imgcenter}
Tubular:
Der Tubulare Linearmotor bietet eine magnetische Symmetrie, die keine Querkräfte bildet, die auf das Führungssystem wirken. Des Weiteren zeichnet sich dieser Typ durch eine grosse Kraftdichte aus und der vorteilhaften Wärmeabfuhr.
 {.imgcenter}
Bildquelle: www.linmot.ch
{.imgcenter}
Bildquelle: www.linmot.ch
Kurzstator:
Beim Kurzstator dient eine Magnetenbahn als Führungsschiene. Das Wanderfeld wird im Translator erzeugt. Obwohl hier das Problem der Energieübertragung zum Translator besteht, eignet sich die Bauform am besten für lange Strecken. Die Energieübertragung zum Translator erfolgt meistens durch Schleppkabeln oder Schleifkontakte.
 {.imgcenter}
{.imgcenter}
U-Profil:


Single- und double-sided-Anordnung:
| PM innenliegend | PM aussenliegend | PM einseitig | |
|---|---|---|---|
| Single |  |
||
| Double |  |
 |
Bildquelle: www.parkem.ch
Der Asynchron-Linearmotor
Der am weitesten verbreitete und am intensivsten untersuchte Linearmotor ist der Linear-Asynchronmotor. Werden Antriebe benötigt, die ohne eine Regelung der Geschwindigkeit arbeiten so kann der Asynchron-Linearmotor auch ohne Umrichter betrieben werden. Zur weiten Verbreitung des Antriebsprinzips trägt zudem sein einfacher Aufbau bei.
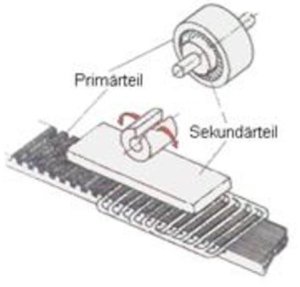
Ähnlich wie der Aufbau des Synchron-Linearmotors lässt sich auch der Aufbau der Asynchron-Linearmaschine durch das Aufschneiden in radialer Richtung und anschließendes Abwickeln in der Ebene einer herkömmlichen Asynchronmaschine herleiten. Auf diese Art und Weise erhält man die einfachste Form des Linearmotors, ein Blechgebilde in Form eines Kammes. Dieser Kamm wird auch als Induktorkamm oder Erregerkamm bezeichnet. In den Erregerkamm wird eine 3phasige Wicklung eingelegt.
Der Ständer der rotatorischen Asynchronmaschine wird zum Primärteil des linearen Asynchronmotors. Gleichzeitig wandelt sich der Läufer der Asynchron-Rotationsmaschine in den Sekundärteil des Asynchron-Linearmotors.
Um ein starkes magnetisches Feld aufzubauen wird ein magnetischer Rückfluss benötigt, weshalb dem Primärteil ein ferromagnetisches Material gegenüber gestellt wird.
 {.imgcenter}
{.imgcenter}
Wirkungsweise
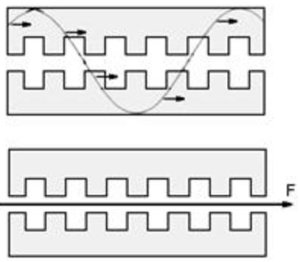
Wird die dreiphasigen Wicklung im Induktorkamm mit Drehstrom gespeist, so bildet sich ein elektromagnetisches Feld aus. Die Amplitude des Feldes bewegt sich längs der Polfläche vom Primärteil. Dieses rein translatorisch bewegte Feld wird als Wanderfeld bezeichnet. Um den magnetischen Fluss zu verstärken, muss ein magnetischer Rückschluss vorhanden sein. Daher wird dem Primärteil ein weiteres Primärteil gegenüber gesetzt, das ebenfalls eine Wicklung trägt.
Um eine elektromagnetische Kraftwirkung zu erzielen, muss in den Luftspalt zwischen den beiden Primärteilen ein elektrisch leitfähiger Stoff, das Sekundärteil, eingebracht werden. Das Wanderfeld durchdringt das Sekundärteil und induziert eine Spannung. Bedingt durch diese Spannung fließt im Sekundärteil ein Wirbelstrom, der mit dem Magnetfeld interagiert und eine Lorentzkraft F erzeugt.
 {.imgcenter}
{.imgcenter}
Aufbau und Funktionsweise
Schaltungsarten
Bei den Linearmotoren ist es üblicherweise so, dass jeder Hersteller für seine Motortypen eine passende Palette an Ansteuerungmodulen anbietet. Anders als beispielsweise einen Schrittmotor, bei dem die Ansteuerung (Leistungstreiber) nicht herstellergebunden ist und mit verschiedenen Leistungstreibern betrieben werden kann, gestaltet sich die Spulenansteuerung eines Linearmotors viel komplexer und wird individuell optimiert. Somit werden diese Motoren mit herstellerspezifischen Anschlüssen geliefert (plug and play) und bieten dem Anwender in der Regel keine Möglichkeit, den Motor auf Spulenebene zu betreiben.
Kenngrössen
Kraft [N]:
Bei Angaben zur Vorschubskraft unterscheiden die Hersteller zwischen einer kurzzeitigen Spitzenkraft und einer Dauerkraft. Diese können je nach Motorleistung und Typ bis zu Spitzenkräfte von 1900N Dauerkäfte 280N erzeugen. Unter Umständen hat ein Linearmotor nicht über die ganze Hublänge eine konstante Kraft. Dies ist zum Beispiel bei tubularen Linearmotoren der Fall. Im ausgefahrenen Zustand befinden sich ein Teil Permanentmagneten ausserhalb des Stators und bringt somit keinen Krafteinfluss.
Wiederholgenauigkeit [μm]:
Da Linearmotoren häufig für Pick-and-Place-Applikationen verwendet werden, stellt die Wiederholgenauigkeit ein wichtiges Mass dar. Üblicherweise befindet sich die Wiederholgenauigkeit im μm-Bereich und bezieht sich auf die motorinterne Positionierung.
Hub [mm]:
Die Hublänge von Linearmotoren ist stark vom Motorentyp abhängig. Tubulare Linearmotoren erreichen kleine Hübe bis knapp über 1000mm. Durch die mechanische Gegebenheit der anderen Motortypen, lassen sich auch Hübe von mehreren Metern erreichen. Beispielsweise beträgt die Strecke vom Transrapid mehrere Kilometer.
Traglast [kg]:
Die Traglast der Linearmotoren hängt von der Führungsart des Translators ab. Des Weiteren kommt diese Angabe für hochdynamische Anwendungen zum Tragen, wenn bestimmte Beschleunigungen und Geschwindigkeiten eingehalten werden müssen.
Stromverbrauch [A]:
Der Strom ist proportional zur Kraft. Somit wird auch beim Stromverbrauch zwischen den Spitzenstrom und dem Dauerstrom unterschieden. Leistungsstarke Motoren erreichen Spitzenströme im Bereich von 40 Ampere, wobei diese von Leistungstreiber begrenzt werden.
Beschleunigung [m/s2]:
Tubulare Linearmotoren sind sehr dynamisch und erreichen Beschleunigungswerte von 300m/s2.
Geschwindigkeit [m/s]:
Da die Linearmotoren direktangetrieben sind, werden sehr hohe Geschwindigkeiten erreicht. Im Falle des Transrapids, werden Geschwindigkeiten von 130m/s (ca 500km/h) erreicht.
Ansteuerung
Der Linearmotor lässt sich nicht so einfach wie zum Beispiel eine Tauchspule ansteuern, bei der die Auslenkung in etwa proportional zur angelegten Spannung steht. Die Auslenkung des Linearmotors wird durch ein Wanderfeld erzielt.
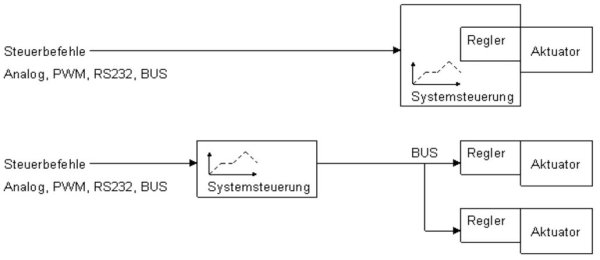
Systemsteuerung:
Bei der Ansteuerung der Linearmotoren wird zwischen der zentralen und der dezentralen Ansteuerung unterschieden.
 {.imgcenter}
{.imgcenter}
Die Systemsteuerung können je nach Anordnung in verschiedenen Modi betrieben werden. In der Regel bietet sich ein Geschwindigkeits-, Positions-, Kraft- und Punkt-zu-Punkt-Modus an. Es besteht auch die Möglichkeit vorprogrammierte Fahrprofile abzufahren oder auch wie bei einem Schrittmotor relative Positionen anzusteuern. In den meisten Fällen bieten die Hersteller einfache Software-Tools für die Inbetriebnahme, Ansteuerung und Programmierung der Systemsteuerungen.
Anwendungsgebiete
Da die Linearmotoren zu den Direktantrieben gehören, keine Abnutzung aufweisen, sehr genau sind und auch sehr leise arbeiten, werden sie für Teilehandling und Bearbeitung für folgende Anwendungen eingesetzt:
Halbleiterfertigung Elektronik
Transporteinrichtungen (Aufzugstechnik)
Verpackungsmaschinen
Biomedizin, Life-Science
Reinraumanwendungen
Test- und Prüfautomaten für wissenschaftliche Zwecke
Wissenschaft, Forschung und Labor
Rundschalttische und Spezialmaschinen
Transrapid
Literaturhinweise
Verbindungsmöglichkeiten Linear-Motor
| Sensortyp | Bemerkung zur Kombination |
|---|---|
| Kapazitiv | Kann falls nötig für Endanschlagsfahrten verwendet werden. |
| Induktiv | Kann falls nötig für Endanschlagsfahrten verwendet werden. |
| Magnetostriktiv | Eignet sich als absoluter Weggeber. |
| Piezo | Nicht geeignet. |
| Potentiometrisch | Eignet sich als absoluter Weggeber. |
| DMS | Nicht geeignet. |
| Fotoelektrisch | Eignet sich als absoluter Weggeber oder für Endanschlagsfahrten. |
| Ultraschall | Nicht geeignet. |
| Magnetisch | Kann falls nötig für Endanschlagsfahrten verwendet werden. Bei linearer Ausführung können Auflösungen bis zu im um-Bereich erreicht werden. |
Verbindungsmöglichkeiten Linear-Motor
| Controllertyp | Bemerkung zur Kombination |
|---|---|
| ASIC | Kann über eine Leistungselektronik oder enstsprechendem Leistungstreiber angesteuert werden. |
| SPS | Kann über entsprechendem Funktionsmodul angesteuert werden. |
| Prozessrechner | Kann über entsprechendem Leistungstreiber angesteuert werden. |
| Microcontroller | Kann über entsprechendem Leistungstreiber oder Elektronik angesteuert werden. |
| Industrie-PC | Kann über entsprechendem Leistungstreiber angesteuert werden. |
Verbindungsmöglichkeiten Linear-Motor
| Identifikationstyp | Bermerkung zur Kombination |
|---|---|
| Barcode | Zurzeit keine Kombination bekannt |
| 2D-Code | Zurzeit keine Kombination bekannt |
| RFID | Zurzeit keine Kombination bekannt |
| Magnetisch | Zurzeit keine Kombination bekannt |
| Bildverarbeitung | Zurzeit keine Kombination bekannt |
| Elektro-Mechanisch | Zurzeit keine Kombination bekannt |
Verbindungsmöglichkeiten Linear-Motor
| Kommunikationstyp | Bemerkung zur Kombination |
|---|---|
| ASI | Kommuniziert in der Regel über den ASI-Bus mit einer SPS. Dabei werden hauptsächlich binäre und durch Erweiterungen auch analoge Werte übertragen. |
| CAN | Mit einer digitalen Schnittstelle können die Daten über einen CAN-Bus weitergeleitet werden. Somit bleiben grosse Kabelbäume erspart. |
| Profibus | Mit einer digitalen Schnittstelle können die Steuerdaten über einen Profibus weitergeleitet werden. Vor allem ürsprünglich analoge Signale können ohne Einflüsse wie Spannungsabfall oder Induzierte Spannungen über weite Distanzen trasportiert werden. |
| Industrial Ethernet / Profinet | Mit dem industrial Ethernet können Steuersignale über grosse Distanzen transportiert werden. Somit können Aktoren ferngesteuert und ferngewartet werden. |