CAN
Grundeigenschaften
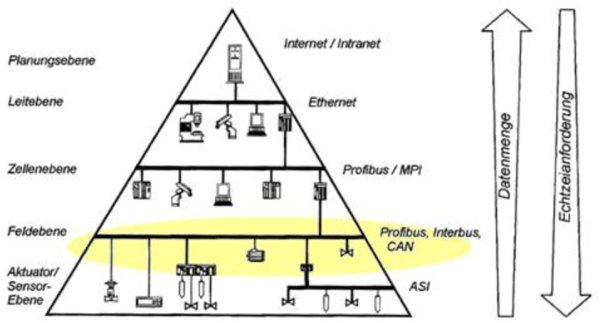
Das CAN-Bussystem (Controller Area Network) wurde ursprünglich von Bosch in Zusammenarbeit mit Intel entwickelt, um im Automobilbau die Kabelbäume zu reduzieren. Das Einsatzgebiet hat sich stark erweitert. Heute wird das CAN-Bussystem in mobilen Systemen, als Maschinen- oder Anlageinternes Kommunikationssystem, im Feldbereich als Fertigungsautomatisierung, in der Gebäudeleittechnik und in vielen anderen Bereichen eingesetzt.
 {.imgcenter}
{.imgcenter}
Der CAN-Bus wird in der Feldebene Eingesetzt. Er eignet sich für Aufgaben mit Echtzeitanforderungen, da durch Prioritätenvergabe auf den Bus eine optimale Echtzeitfähigkeit erreicht wird. Da der CAN-Bus nicht standardisiert wurde, sind die Ausführungen stark vom Hersteller abhängig.
Bauformen
Netzwerktopologie
Linearer CAN-Bus. Das CAN-Netzwerk wird als Linienstruktur aufgebaut. Stichleitungen sind in eingeschränktem Umfang zulässig. Des Weiteren sind auch ein ringförmiger Bus (Infotainment Bereich) sowie ein sternförmiger Bus (Zentralverriegelung) möglich.
Aufbau und Funktionsweise
Komponenten und Netzaufbau
Es gibt eine Vielzahl an Produkten auf dem Markt, die mit dem CAN-Bussystem Informationen austauschen. Um z.B. Sensoren/Aktoren an ein CAN-Bus anzubinden, kann ein I/O-Modul gekauft werden. Das I/O-Modul bietet die Möglichkeit, digitale und analoge Ein-/Ausgänge an ein CAN-Bussystem anzubinden.
 {.imgcenter}
{.imgcenter}
Bildquelle: www.mkt-sys.de
Ansteuerung
Buszugriffsverfahren
Der CAN-Bus arbeitet nach dem CSMA/CR (Carrier Sense Multiple Access / Collision Resolution) Verfahren. Dabei werden Kollisionen beim Buszugriff durch die Arbitrierung oder Bit-Arbitrierung aufgelöst (siehe unten). Die Daten sind NRZ-L-kodiert. Das CSMA Buszugriffsverfahren normalerweise nicht echtzeitfähig. Da beim CAN-Bus jedoch die Möglichkeit besteht, eine Nachricht mit Echtzeitanforderungen höher zu priorisieren, bietet dieses Bussystem Echtzeitfähigkeit.
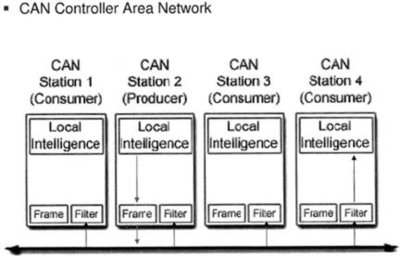
Der Bus ist entweder mit Kupferleitungen oder über Glasfaser ausgeführt. Der CAN-Bus arbeitet nach dem "Multi-Master Prinzip": Mehrere gleichberechtigte Steuergeräte (=Busteilnehmer) sind durch eine topologische Anordnung (siehe unten) miteinander verbunden.
Die Übertragung der Daten erfolgt so, dass ein Bit, je nach Zustand, entweder dominant oder rezessiv auf den Busleitungen wirkt. Ein dominantes überschreibt dabei ein rezessives Bit.
 {.imgcenter}
Bildquelle: HSR Vorlesungsunterlagen Mechatronik
{.imgcenter}
Bildquelle: HSR Vorlesungsunterlagen Mechatronik
Objektidentifier
Der Objektidentifier kennzeichnet den Inhalt der Nachricht, nicht das Gerät. Zum Beispiel kann in einem Messsystem den Parametern Temperatur, Spannung, Druck jeweils ein eigener Identifier zugewiesen sein. Die Empfänger entscheiden anhand des Identifiers, ob die Nachricht für sie relevant ist oder nicht.
Zudem dient der Objektidentifier auch der Priorisierung der Nachrichten.
Arbitrierung, Priorität
Der Buszugriff wird verlustfrei mittels der bitweisen Arbitrierung auf Basis der Identifier der zu sendenden Nachrichten aufgelöst. Dazu überwacht jeder Sender den Bus, während er gerade den Identifier sendet. Senden zwei Teilnehmer gleichzeitig, so überschreibt das erste dominante Bit eines der Beiden das entsprechend rezessive des Anderen, welcher dieses erkennt und seinen Übertragungsversuch beendet, damit der Andere seine Daten übertragen kann.
Für die Übertragung von zeitkritischen Nachrichten kann also ein Identifier hoher Priorität vergeben werden, um ihnen so Vorrang bei der Übertragung zu gewähren.
Kenngrössen
Je nach Hersteller können die Angaben unterschiedlich sein.
Max. Teilnehmer:
32 Teilnehmer (ohne Repeater); mit Repeater unbegrenzte Teilnehmerzahl
Übertragungsrate:
1 MBd bei 40 m Leitungslänge
50 kBd bei 1000 m Leitungslänge
Leitungslänge:
40 m bei 1MBd Übertragungsrate
1000 m bei 50 kBd Übertragungsrate
Telegrammformat:
Nutzdaten 8 Byte
Datensicherung:
16 Bit-CRC, HD = 6
Anwendungsgebiete
Der CAN-Bus wird in der Feldebene Eingesetzt. Er eignet sich für Aufgaben mit Echtzeitanforderungen, da durch Prioritätenvergabe auf den Bus eine optimale Echtzeitfähigkeit erreicht wird. Da der CAN-Bus nicht standardisiert wurde, sind die Ausführungen stark vom Hersteller abhängig.
Vor- Nachteile eines CAN-Bus:
Vorteile
- Erlaubt einen prioritätsgesteuerten, zuverlässigen Buszugriff nach Bedarf und bietet optimale Echtzeitfähigkeit.
- Hohe Übertragungssicherheit
- Niedrige Kosten für die Feldbusankopplung
Nachteile
Ausblick
Der CAN-Bus wurde ursprünglich für die Automobilindustrie entwickelt, um eine schnelle und störsichere Verbindung in Linienform zu realisieren. Aufgrund der für hohe Übertragungsraten bei kurzen Entfernungen optimierten Architektur finden CAN-Bussysteme vielfach auch in industriellen Bereichen Anwendung, wo abgeschlossene Systeme wie beispielsweise Maschinen mit einer effizienten Infrastruktur zum Datentransport ausgestattet werden sollen.
Literaturhinweise:
- Berthold Heinrich, Mechatronik, ISBN3-528-03957-4
- Wikipedia: wikipedia.org/wiki/Can-bus
- www.mkt-sys.de
- Berthold Heinrich, Mechatronik, ISBN3-528-03957-4
- Gerhard Schnell, Bussysteme in der Automatisierungs- und Prozesstechnik, ISBN 3-528-46569-7
Verbindungsmöglichkeiten CAN-Bus
| Sensortyp | Bemerkung zur Kombination |
|---|---|
| Kapazitiv | Der CAN-Bus bietet I/O-Module mit digitalen und analogen Eingängen/Ausgängen an. Somit kann ein kapazitiver Sensor an einen CAN-Bus angeschlossen werden. Der CAN-Bus eignet sich besonders auch für zeitkritische Sensoren im Feld. |
| Induktiv | Der CAN-Bus bietet I/O-Module mit digitalen und analogen Eingängen/Ausgängen an. Somit kann ein induktiver Sensor an einen CAN-Bus angeschlossen werden. Der CAN-Bus eignet sich besonders auch für zeitkritische Sensoren im Feld. |
| Magnetostriktiv | Der CAN-Bus bietet I/O-Module mit digitalen und analogen Eingängen/Ausgängen an. Somit kann ein magnetostriktver Sensor an einen CAN-Bus angeschlossen werden. Der CAN-Bus eignet sich besonders auch für zeitkritische Sensoren im Feld. |
| Piezo | Der CAN-Bus bietet I/O-Module mit digitalen und analogen Eingängen/Ausgängen an. Somit kann ein Piezo Sensor an einen CAN-Bus angeschlossen werden. Der CAN-Bus eignet sich besonders auch für zeitkritische Sensoren im Feld. |
| Potentiometrisch | Der CAN-Bus bietet I/O-Module mit digitalen und analogen Eingängen/Ausgängen an. Somit kann ein potentiometrischer Sensor an einen CAN-Bus angeschlossen werden. Der CAN-Bus eignet sich besonders auch für zeitkritische Sensoren im Feld. |
| DMS | Der CAN-Bus bietet I/O-Module mit digitalen und analogen Eingängen/Ausgängen an. Somit kann ein DMS Sensor an einen CAN-Bus angeschlossen werden. Der CAN-Bus eignet sich besonders auch für zeitkritische Sensoren im Feld. |
| Fotoelektrisch | Der CAN-Bus bietet I/O-Module mit digitalen und analogen Eingängen/Ausgängen an. Somit kann ein fotoelektrischer Sensor an einen CAN-Bus angeschlossen werden. Der CAN-Bus eignet sich besonders auch für zeitkritische Sensoren im Feld. |
| Ultraschall | Der CAN-Bus bietet I/O-Module mit digitalen und analogen Eingängen/Ausgängen an. Somit kann ein Ultraschall Sensor an einen CAN-Bus angeschlossen werden. Der CAN-Bus eignet sich besonders auch für zeitkritische Sensoren im Feld. |
| Magnetisch | Der CAN-Bus bietet I/O-Module mit digitalen und analogen Eingängen/Ausgängen an. Somit kann ein magnetischer Sensor an einen CAN-Bus angeschlossen werden. Der CAN-Bus eignet sich besonders auch für zeitkritische Sensoren im Feld. |
Bemerkung:
Der CAN-Bus wird in der Regel auf der Feldebene eingesetzt. Mit dezentralen I/O-Modulen können jedoch einzelne Sensoren/Aktoren an einen CAN-Bus angeschlossen werden.
Verbindungsmöglichkeiten CAN-Bus
| Aktortyp | Bemerkung zur Kombination |
|---|---|
| Magnetostriktiv | Der CAN-Bus bietet I/O-Module mit digitalen und analogen Eingängen/Ausgängen an. Somit kann ein magnetostriktver Aktor mit einem CAN-Bus angesteuert werden. |
| Piezo | Der CAN-Bus bietet I/O-Module mit digitalen und analogen Eingängen/Ausgängen an. Somit kann ein Piezo Aktor mit einem CAN-Bus angesteuert werden. |
| Synchronmotor | Ein Synchronmotor kann über ein I/O-Modul oder mit direkt integriertem CAN-Anschluss im Aktor an das CAN-Buskabel angeschlossen werden, um mit der SPS zu kommunizieren. Dabei wird nicht der Motor direkt, sondern eher ein Schütz/Relais angesteuert, um den Motor zu steuern. |
| Asynchronmotor | Ein Asynchronmotor kann über ein I/O-Modul oder mit direkt integriertem CAN-Anschluss im Aktor an das CAN-Buskabel angeschlossen werden, um mit der SPS zu kommunizieren. Dabei wird nicht der Motor direkt, sondern eher ein Schütz/Relais angesteuert, um den Motor zu steuern. |
| Schrittmotor | Ein Schrittmotor kann über ein I/O-Modul oder mit direkt integriertem CAN-Anschluss im Aktor an das CAN-Buskabel angeschlossen werden, um mit der SPS zu kommunizieren. Dabei wird nicht der Motor direkt, sondern eher ein Leistungstreiber angesteuert, um den Motor zu steuern. |
| Linearmotor | Ein Linearmotor kann über ein I/O-Modul oder mit direkt integriertem CAN-Anschluss im Aktor an das CAN-Buskabel angeschlossen werden, um mit der SPS zu kommunizieren. Dabei wird nicht der Motor direkt, sondern eher eine Leistungselektronik für den Linearmotor angesteuert, um den Motor zu steuern. |
| Tauchspulenmotor | Der CAN-Bus bietet I/O-Module mit digitalen und analogen Eingängen/Ausgängen an. Dabei wird je nach Leistung des Ausgangs eher eine Leistungselektronik für den Tauchspulenmotor angesteuert. |
| Smart-Materials | Der CAN-Bus bietet I/O-Module mit digitalen und analogen Eingängen/Ausgängen an. Dabei wird je nach Leistung des Ausgangs eher eine Leistungselektronik für Smart-Materials angesteuert. |
Bemerkung:
Der CAN-Bus wird in der Regel auf der Feldebene eingesetzt. Mit dezentralen I/O-Modulen können jedoch einzelne Sensoren/Aktoren an einen CAN-Bus angeschlossen werden.
Verbindungsmöglichkeiten CAN-Bus
| Controllertyp | Bemerkung zur Kombination |
|---|---|
| ASIC | Als Funktion integrierbar |
| SPS | Die SPS unterstützt je nach Hersteller CAN-Bus und ist deshalb gut geeignet. |
| Prozessrechner | Mit entsprechendem Funktionsmodul integrierbar |
| Microcontroller | Wenn die Protokolle bekannt sind, kann es implementiert werden. |
| Industrie-PC | Mit entsprechendem Funktionsmodul integrierbar |
Verbindungsmöglichkeiten CAN-Bus
| Identifikationstyp | Bermerkung zur Kombination |
|---|---|
| Barcode | Wird ein entsprechendes Module für das Einlesen der Daten von einem Barcodeleser auf dem Markt angeboten, ist eine Datenverarbeitung mittels CAN-Bus gut vorstellbar. |
| 2D-Code | Wird ein entsprechendes Module für das Einlesen der Daten von einem 2D-Codeleser auf dem Markt angeboten, ist eine Datenverarbeitung mittels CAN-Bus gut vorstellbar. |
| RFID | Auf dem Markt existieren Funktionsmodule, um RFID zu lesen. |
| Magnetisch | Wird ein entsprechendes Module für das Einlesen der Daten von einem Magnetstreifenleser auf dem Markt angeboten, ist eine Datenverarbeitung mittels CAN-Bus gut vorstellbar. |
| Bildverarbeitung | Wird ein entsprechendes Module für das Einlesen der Daten von einer digitalen Bildkamera auf dem Markt angeboten, ist eine Datenverarbeitung mittels CAN-Bus gut vorstellbar. |
| Elektro-Mechanisch | Wird ein entsprechendes Module für das Einlesen von Elektro-Mechanischen Daten auf dem Markt angeboten, ist eine Datenverarbeitung mittels CAN-Bus gut vorstellbar. |