Asynchron-Motor
Grundeigenschaften
Der Asynchronmotor ist der am meisten verwendete Elektromotor. Dieser kann entweder als Motor oder als Generator betrieben werden. Eines der Hauptvorteile ist seine verschleissarme Arbeitsweise. Da dieser Motor ohne Bürsten (Kommutator) arbeitet (d.h. der Rotor ist mit dem Stator nicht elektrisch verbunden), entstehen beim Drehen keine Funken und somit auch keine elektrischen Störfeldern.
Die weiteren Grundeigenschaften werden anhand eines dreiphasigen Drehstrommotors erklärt. Als Stromquelle dient in diesem klassischen Fall ein dreiphasiges Drehstromnetz (L1, L2, L3). Dessen Frequenz bestimmt die Drehzahl des Drehfeldes im Stator. Dieses induziert im Rotor eine Spannung, die denselben folglich in eine Rotationsbewegung versetzt. Der Rotor muss nicht synchron mit der Drehzahl des Drehfeldes mitlaufen, daher der Name Asynchronmotor. Unter Belastung ist die Rotordrehzahl kleiner als die Statordrehzahl.

Bildquelle: www.angst-pfister.com
Stator:
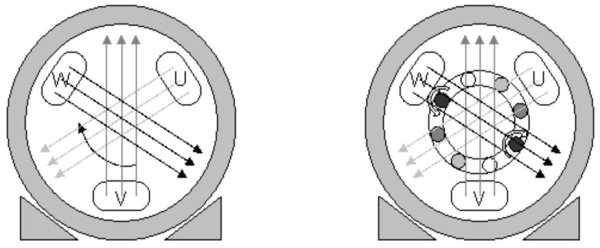
Im Stator des Motors sind die Wicklungen angebracht, welche ein Drehfeld erzeugen. Im Falle des dreiphasigen Drehstrommotors sind die drei Wicklungen in Abständen von 120° zu einander versetzt.
 {.imgcenter}
{.imgcenter}
Rotor:
Der Rotor besteht im Wesentlichen aus einem Käfig und bildet eine in sich geschlossene Einheit. Der Käfig besteht aus Kupfer- oder Alluminiumstränge, die miteinander kurzgeschlossen sind (daher auch der Name Käfig- oder Kurzschlussläufer).
Das magnetische Drehfeld im Stator induziert im Käfig eine Spannung. Diese Spannung führt in den gut leitenden und kurzgeschlossenen Strängen des Käfigs zu einem Strom. Der Strom führt folglich zu einer magnetischen Kraft, bezogen auf das Drehfeld des Stators, welche den Rotor in eine Drehbewegung versetzt.

Schlupf:
Als Schlupf bezeichnet man die Differenz zwischen der Drehfeld-Drehzahl (vom Stator) und der Drehzahl des Rotors. Umso grösser der Schlupf ist, desto grösser sind die Ströme im Rotor, daher auch die hohen Anfahrströme. Dies bedeutet aber auch, dass wenn die Rotordrehzahl gleich der Drehfelddrehzahl ist, keine Ströme im Rotor fliessen und somit auch kein Drehmoment erzeugt wird. Die Rotordrehzahl ist somit stets kleiner als die Drehfelddrehzahl.
Bauformen
Die Bauformen der Asynchronmotoren unterscheiden sich in ihrer Rotorform. Die Statorform bleibt für alle Formen gleich. Die Rotoren werden wie folgt unterteilt:
Kurzschlussläufer:
Der Kurzschlussläufer besteht aus einem Käfig. Die Stränge des Käfigs werden zusammen kurzgeschlossen. Der Rotor ist eine in sich geschlossenen Einheit.
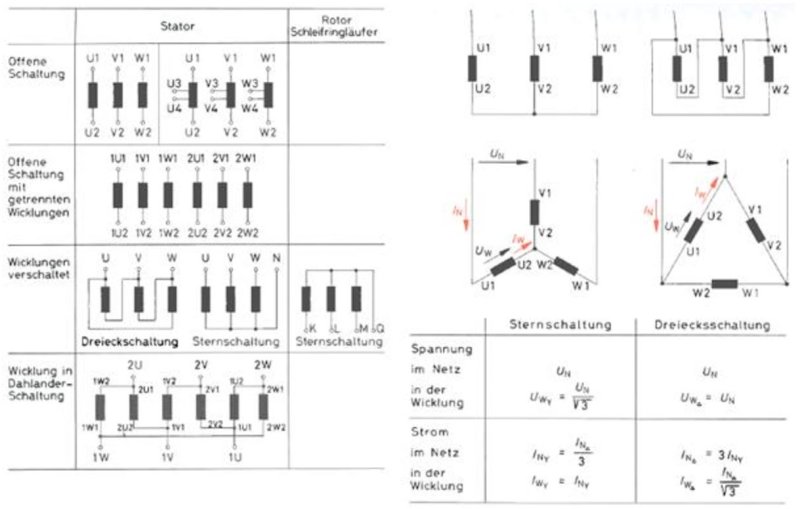
Schleifringläufer:
Im Schleifringläufer sind an Stelle der Stränge Wicklungen angebracht, die nicht miteinander kurzgeschlossen sind, sonder über Schleifringe nach aussen gebracht werden. Diese Eigenschaft bietet die Möglichkeit den Stromfluss im Rotor zu regulieren. Bei leistungsstarken Motoren werden somit mit Widerständen die Anfahrströme begrenzt.
 {.imgcenter}
{.imgcenter}
Bildquelle: Elektrische Antriebe, Vogel Fachbuch
Aufbau und Funktionsweise
Schaltungsarten
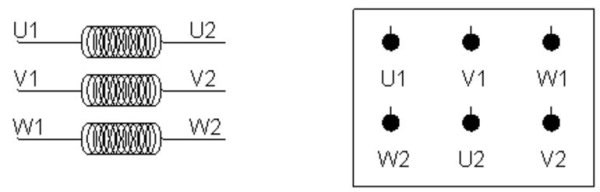
Anschlussbrett:
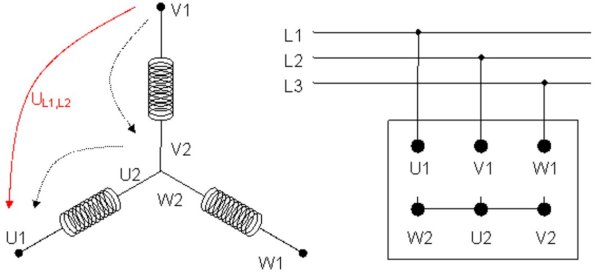
Die sechs Wicklungsenden im Stator eines dreiphasigen (U, V, W) Drehstrommotors werden an den Anschlussklemmen herausgeführt und als U1, U2, V1, V2, W1 und W2 bezeichnet. Diese können dann je nach Betriebsart zum Beispiel in Stern oder Dreieck verschaltet werden.
 {.imgcenter}
{.imgcenter}
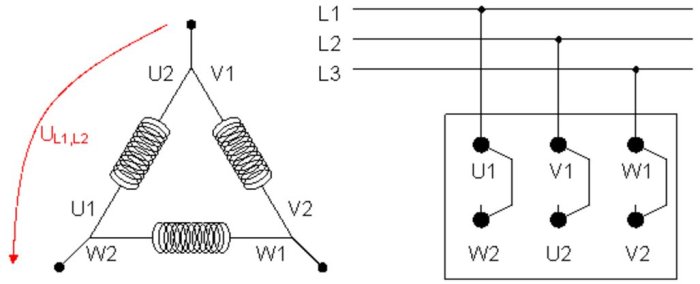
Dreieck:
Bei der Dreiecksschaltung werden die Statorwicklungen mit der vollen Spannung erregt. Mit dieser Wicklungsanordnung gibt der Motor die grösste Leistung ab.
 {.imgcenter}
{.imgcenter}
Stern:
Bei dieser Schaltungsart werden die Statorspulen in Stern geschaltet. Dadurch teilen sich die angelegten Spannungen immer über zwei Statorspulen. Dies begrenzt den Strom und folglich auch das Drehmoment auf ein Drittel, verglichen zur Dreieckschaltung. Bei asymmetrischen Belastungen (U¹V¹W) wird über den Sternpunkt als Neutralleiter der Ausgleichsstrom zurückgeführt.
 {.imgcenter}
{.imgcenter}
Kenngrössen
Drehmoment [Nm]:
Das Drehmoment wird anhand einer Kennlinie abgebildet. Für die Darstellung wird zwischen einer Drehzahl-Dremoment-Kennlinie und einer Drehmoment-Drehzahl-Kennlinie (Belastungskennlinie) unterschieden.
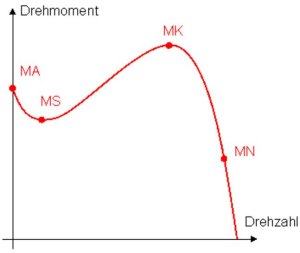
Drehzahl-Dremoment-Kennlinie:
Beim Anlaufen erzeugt der Motor ein Anzugsmoment MA. Durch die Gegebenheiten der Bauweise entsteht im Drehmomentverlauf ein Sattelpunkt, welcher dem kleinsten Drehmoment (Sattelmoment MS) nach dem Anlauf entspricht. Die Kennlinie steigt bis zum Kippmoment MK. Danach wirkt sich der Rückgang des Läuferinduktionsstromes verstärkt aus und verringert das Motorendrehmoment. Bei der Nenndrehzahl erreicht der Motor das Nennmoment MN.
 {.imgcenter}
{.imgcenter}
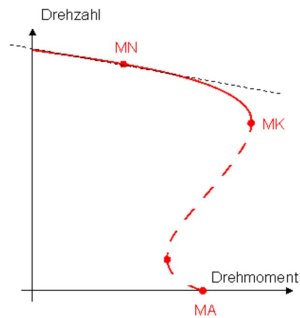
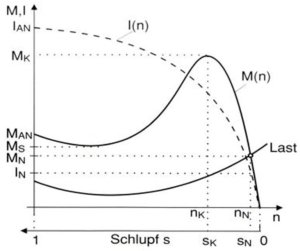
Drehmoment-Drehzahl-Kennlinie (Belastungskennlinie):
Die Belastungskennlinie zeigt die Abhängigkeit der Motorendrehzahl vom Motordrehmoment. Bei steigender Belastung nimmt die Drehzahl ab. Im Leerlauf erreicht der Motor fast die Drehfelddrehzahl. Belastungsänderungen wirken sich im Nennbereich proportional auf die Schlupfdrehzahl aus.
 {.imgcenter}
{.imgcenter}
 {.imgcenter}
{.imgcenter}
Stromverbrauch [A]:
Polpaarzahl p:
Die Polzahl p steht für die Anzahl Polpaare im Motor. Diese Angabe wird für die Berechnung der Drehzahl benötigt.
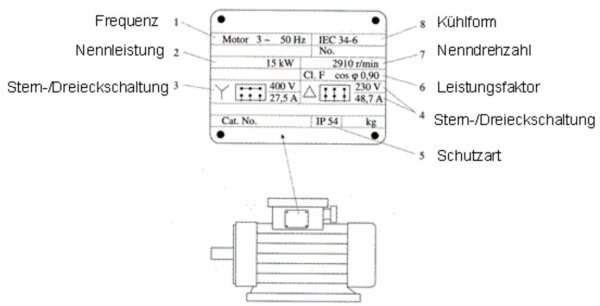
Frequenz f [Hz]:
Bezieht sich auf die Netzfrequenz einer Phase. Diese Angabe wird für die Berechnung der Drehzahl benötigt.
Drehzahl n [U/min]:
Die Drehzahl eines Asynchronmotors ist von seiner Netzfrequenz und seiner Polzahl abhängig. Sie Berechnet sich aus der Division von Frequenz durch Polzahl.
Leistungsfaktor cos j:
Der Leistungsfaktor gibt an, wie viel von der total aufgenommenen Leistung in Wirkleistung umgesetzt wird. Ein cos j von 0.89 bedeutet, dass die Wirkleistung 89% der aufgenommenen Scheinleistung beträgt.
 {.imgcenter}
{.imgcenter}
Formeln
Die Drehzahl nd des Ständerdrehfeldes berechnet sich aus:
[
n{d} = {f \over p}
]
Drehzahl n des Läufers:
[
n = n{d}(1-s)
]
Der Schlupf s berechnet sich aus:
[
s = {n{d} - n \over n{d}} \cdot 100 \%
]
Die Wirkleistung P berechnet sich aus:
- Für Einphasenmotoren: [ P = U \cdot I \cdot cos(\phi) ]
- Für Dreiphasenmotoren:
[ P = \sqrt 3 \cdot U \cdot I \cdot cos(\phi) ]
Ansteuerung
Anlaufverfahren:
Beim direkten Anlauf eines Motors am Netz, fliesst ein sehr hoher Strom, der dem 3 bis 8-fachen des Nennstromes entspricht. Dabei entstehen hohe Anlaufverlüste.
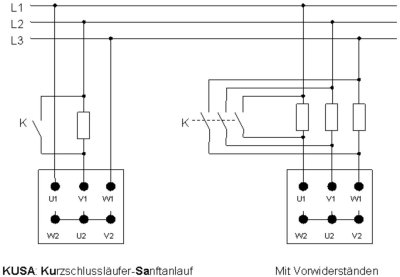
Anlaufverfahren mit Vorwiderständen
Beim Anlaufen des Motors wird der Anlaufstrom mit Vorwiderständen begrenzt. Nach der kurzen Anlaufzeit werden die Vorwiderstände mit einem Schütz K überbrückt.
 {.imgcenter}
{.imgcenter}
Anlaufverfahren mit Stern-Dreieck-Schaltung
Durch die Umschaltung von der Stern- auf die Dreiecksschaltung des Klemmsteges, wird die Motorleistung beim Anfahren begrenzt. Das Umschalten erfolgt mit einem Schütz K und diversen Hilfskontakte.
Anlaufverfahren mit Anlasstransformatoren
Die variablen Transformatoren regulieren die Spannungen. Beim Anlauf fahren sie die Spannung langsam hoch.
Frequenzumrichter:
Bei den oben genannten Anlaufschaltungen wird lediglich der Anlaufstrom begrenzt. Die Drehfeldfrequenz bleibt aber unverändert. Der Frequenzumrichter hingegen variiert die Spannung und die Drehfeldfrequenz. Mit dieser Ansteuerungsart kann der Drehstrommotor in einem weiten Drehzahlbereich betrieben werden.
Anwendungsgebiete
Pumpenantriebe
Kompressoren (z. B. Kältemittelkompressoren für kleinere Kühlräume)
Ventilatoren für alle Industriebereiche
Antriebe für Flurförderzeuge
Traktionsantriebe für Autos und Busse (Elektro- oder Hybridfahrzeuge)
Werkzeugmaschinenantriebe (z. B. Hauptspindelantriebe)
Traktionsantriebe für Bahnen
Seil/Kettenzugantrieb
Literaturhinweise
- Fachkunde Elektrotechnik (Europa Lehrmittel)
Verbindungsmöglichkeiten Asynchron-Motor
| Sensortyp | Bemerkung zur Kombination |
|---|---|
| Kapazitiv | Kann im Bereich der Drehzahlmessung verwendet werden. |
| Induktiv | Kann im Bereich der Drehzahlmessung verwendet werden. |
| Magnetostriktiv | Nicht geeignet. |
| Piezo | Nicht geeignet. |
| Potentiometrisch | Nicht geeignet. |
| DMS | Nicht geeignet. |
| Fotoelektrisch | Kann im Bereich der Drehzahlmessung verwendet werden. |
| Ultraschall | Nicht geeignet. |
| Magnetisch | Kann im Bereich der Drehzahlmessung verwendet werden. |
Verbindungsmöglichkeiten Asynchron-Motor
| Controllertyp | Bemerkung zur Kombination |
|---|---|
| ASIC | Kann über eine Leistungselektronik oder enstsprechendem Leistungstreiber (Frequenzumrichter) angesteuert werden. |
| SPS | Kann über entsprechendem Funktionsmodul (Frequenzumrichter) oder Leistungswandler angesteuert werden. |
| Prozessrechner | Kann über entsprechendem Leistungstreiber (Frequenzumrichter) angesteuert werden. |
| Microcontroller | Kann über entsprechendem Leistungstreiber (Frequenzumrichter) oder Elektronik angesteuert werden. |
| Industrie-PC | Kann über entsprechendem Leistungstreiber (Frequenzumrichter) angesteuert werden. |
| Frequenzumrichter | Ein Frequenzumrichter generiert die Spannungen in den Motorenphasen. Mit variabler Spannung und Frequenz wird die Motorendrehzahl verändert. |
Verbindungsmöglichkeiten Asynchron-Motor
| Identifikationstyp | Bermerkung zur Kombination |
|---|---|
| Barcode | Zurzeit keine Kombination bekannt |
| 2D-Code | Zurzeit keine Kombination bekannt |
| RFID | Zurzeit keine Kombination bekannt |
| Magnetisch | Zurzeit keine Kombination bekannt |
| Bildverarbeitung | Zurzeit keine Kombination bekannt |
| Elektro-Mechanisch | Zurzeit keine Kombination bekannt |
Verbindungsmöglichkeiten Asynchron-Motor
| Kommunikationstyp | Bemerkung zur Kombination |
|---|---|
| ASI | Kommuniziert in der Regel über den ASI-Bus mit einer SPS. Dabei werden hauptsächlich binäre und durch Erweiterungen auch analoge Werte übertragen. |
| CAN | Mit einer digitalen Schnittstelle können die Daten über einen CAN-Bus weitergeleitet werden. Somit bleiben grosse Kabelbäume erspart. |
| Profibus | Mit einer digitalen Schnittstelle können die Steuerdaten über einen Profibus weitergeleitet werden. Vor allem ürsprünglich analoge Signale können ohne Einflüsse wie Spannungsabfall oder Induzierte Spannungen über weite Distanzen trasportiert werden. |
| Industrial Ethernet / Profinet | Mit dem industrial Ethernet können Steuersignale über grosse Distanzen transportiert werden. Somit können Aktoren ferngesteuert und ferngewartet werden. |