Induktiv
Grundeigenschaften
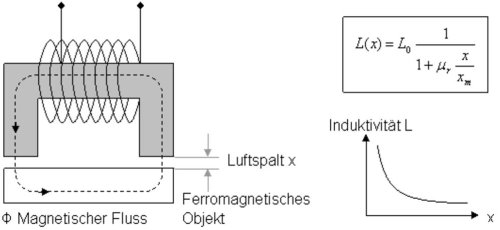
Induktive Sensoren nutzen die Beeinflussung der magnetischen Induktivität L einer Spule aus. Sobald sich ein ferromagnetischer Körper im Magnetfeld der Spule bewegt, verändert sich deren Induktivität. Die Tatsache, dass klassische induktive Sensoren nur auf ferromagnetischen Obejkten reagieren, bringen folgende Vorteile: Schmutzunempfindlichkeit, berührungslose Arbeitsweise, verschleissfreie Arbeitsweise, eine allgemeine Unempfindleichkeit gegen äussere Einflüsse wie Flüssigkeiten und arbeitet rückwirkungslos.
Das Prinzip kann anhand einer Spule mit Eisenkern und Luftspalt erklärt werden.
 {.imgcenter}
{.imgcenter}
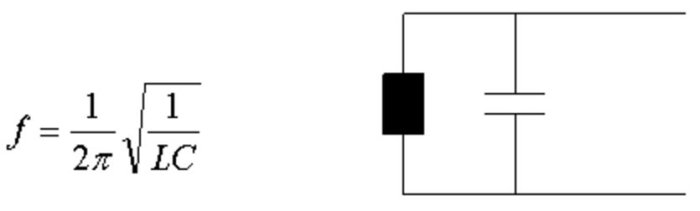
Wie es aus der obenstehenden Formel ersichtlich ist, ist die Änderung der Induktivität nicht linear zur Änderung des Luftspaltes x. In gewissen Applikationen wird für die Auswertung die Differenz aus zweier gegensinnigen Spulen genommen. Durch diese Operation verläuft die neue Kennlinie annähernd linear. Des Weiteren wird so eine Temperaturkompensation erreicht. Diese Spule bildet das „L“ eines LC-Schwingkreises. Die aktive Fläche der Spule ist nach aussen gerichtet und strahlt das magnetische Feld aus. Das C bleibt dabei konstant. Je nach Auswerteverfahren und Elektronik wird fernern entweder die Frequenz oder die Amplitude der Schwingung des Schwingkreises von der internen Elektronik analysiert. Das Sensorsignal besteht bei beiden Verfahren aus einer Spannung (typischerweise zwischen 0 und 10 Volt). Bei der Frequenzanalyse wird die Verstimmung des Schwingkreises untersucht, verursacht durch die Änderung der Induktivität am Messfühler. Die Frequenz eines Schwingkreises berechnet sich aus:
 {.imgcenter}
{.imgcenter}
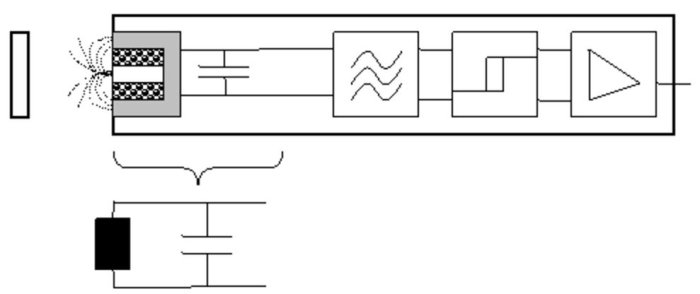
Im Falle der Amplitudenanalyse (Wirbelstromsensor) wird der Schwingkreis mit einem hochfrequenten Oszillator angeregt. Das elektromagnetische Wechselfeld tritt aus der aktiven Seite der Spule aus und induziert Wirbelströme im naheliegenden Metallobjekt, der in diesem Fall nur elektrisch leitend sein muss und sowohl ferromagnetisch als auch nicht-ferromagnetisch sein kann. Diese Wirbelströme entziehen dem Oszillator Energie, was eine Pegeländerung der Schwingung zur Folge hat.
Ein einfacher induktiver Näherungsschalter sieht wie folgt aus. Dieser arbeitet nach dem Prinzip der Amplitudenanalyse. Das Kernstück bildet ein LC-Schwingkreis, wobei das L aus der oben erwähnten Spule besteht und mit der aktiven Seite nach aussen strahlt. Das Signal aus dem Oszillator wird von einer Triggerstufe überwacht. Sobald die Amplitude den Schaltpunkt unterschreitet, wird am Ausgang des Sensors über die Leistungsstufe das Schaltsignal freigegeben.
 {.imgcenter}
{.imgcenter}
Bauformen
Einbauformen Nicht bündig = grosse Distanz, Zwingend bei Einbau in ferromagnetischen Materialien Quasibündig = mittlere Distanz Bündig = kleine Distanz, Trägermaterial beeinflusst Schaltabstand
Rund: In der runden Bauform werden sowohl Näherungsschalter mit digitalem Ausgang (für Ein-Aus-Auswertungen) oder mit analogem Ausgang (für integrale Abstandsmessung) gebaut.

Quadratisch:

Bildquelle: www.Baumerelectric.com
Zylinderförmig (LVDT): Diese Bauform wird für induktive Wegaufnehmer verwendet. Sie beruht auf dem Transformatorprinzip und sieht folgendermassen aus:
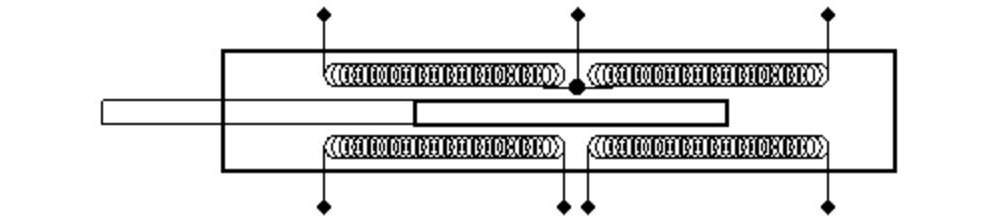
Die obere Spule wird mit einer Frequenz angeregt. Aufgrund der Position des Eisenkerns, der mechanisch nach aussen verbunden ist, wird in den unteren zwei Spulen eine Spannung induziert. Durch die Differenz der beiden Spannungen kann die Position des Eisenkerns charakterisiert werden und somit eine Wegmessung durchgeführt werden. Mit diesem Verfahren können Wege bis zu einem halben Meter gemessen werden. Einziger Nachteil, die Messung erfolgt nicht berührungslos.
Aufbau und Funktionsweise
Schaltungsarten In der Mechatronik werden in den meisten Anwendungen induktive Sensoren mit einem Schaltkontakt verwendet (einfache Näherungsschalter). Dabei geht es darum herauszufinden ob ein ferromagnetisches Objekt vorhanden ist oder nicht. Dieser digitale Zustand wird am Sensorausgang in verschiedenen Formen zur Verfügung gestellt. Hier die gängigsten Ausgangsschaltungsarten.
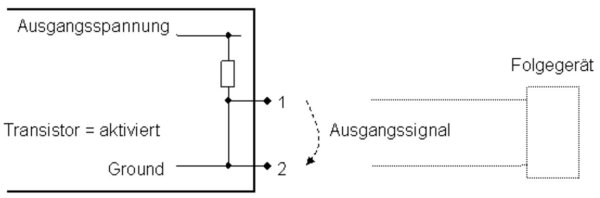
Opencollector-Ausgang: Beim Opencollector-Ausgang dient im Sensor ein Transistor als Schalter. Der Transistor schaltet nicht direkt die Last, das heisst, der Laststrom fliesst nicht durch den Transistor. Für die Erklärung ist zu beachten, dass das Ausgangssingal (zwischen den Klemmpunkten 1 und 2) invertiert zum Transistorsignal steht. Das Folgegerät wird an den Klemmanschlüssen 1 und 2 angeschlossen.
 {.imgcenter}
{.imgcenter}
Ist der Transistor aktiviert, so ist der Klemmanschluss 1 mit 2 (Ground) verbunden. Somit beträgt das Ausgangspotential null Volt.
 {.imgcenter}
{.imgcenter}
Ist der Transistor deaktiviert, steht im unbelasteten Fall die volle Ausgangsspannung am Klemmanschluss 1 an. Wird das Ausgangssignal von einem niederohmigen Verbraucher mit einem Strom i belastet, wird die Ausgangspannung um den Faktor (R x i) reduziert. Daher eignet sich diese Ausgangsschaltung nicht für grosse Lasten.
 {.imgcenter}
{.imgcenter}
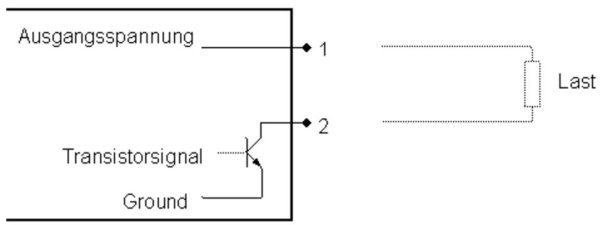
Transistor: Beim Transistorausgang wird immer zwischen dem PNP- und dem NPN-Ausgangs unterschieden. Hier übernimmt der Transistor die Aufgabe eines Schaltkontaktes, das heisst, der Laststrom fliesst direkt durch den Transistor im Sensor.
NPN: Beim NPN-Ausgang schaltet der Transistor im aktiven Zustand die Last auf Ground und bewirkt so einen Stromfluss.
 {.imgcenter}
{.imgcenter}
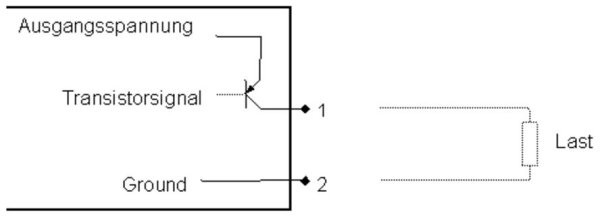
PNP: Beim PNP-Ausgang wird der Last die Ausgangsspannung zugeschaltet.
 {.imgcenter}
{.imgcenter}
Schaltkontakt: Es gibt Sensoren, die einen gewöhnlichen mechanischen Schaltkontakt haben. Dieser Schaltkontakt erreicht aber nicht so hohe Schaltfrequenzen wie ein Transistor.
Kenngrössen
Baugrösse [mm]:
Gibt die Baugrösse in mm an. Bei zylindrischen Sensoren mit Gewindegehäuse gibt es Grössen von M4 bis M30.
Einbauart:
Es wird grundsätzlich zwischen der "bündigen" und eine "nicht bündigen" Einbauart unterschieden. Bei der bündigen Einbauart ist die aktive Fläche des Sensors auf gleicher Ebene wie das Trägermaterial.
Bauform:
Gibt an ob der Sensor beispielsweise eine quaderförmige oder zylindrische Bauform hat.
Gehäusematerial:
Metallgehäuse oder Kunststoffgehäuse.
Messdistanz [mm]:
Die Messdistanz bezieht sich auf induktive Sensoren mit analogem Ausgang zur Distanzmessung. Typische Messdistanzen sind 0 bis 10mm.
Schaltabstand [mm]:
Der Schaltabstand bezieht sich auf Näherungsschalter mit binärem Ausgang. Dieser wird vom Hersteller mit einer Norm-Messplatte (z.B. Fe 360, ST 37) definiert. Werden andere Materialien für die Messung verwendet, muss der Schaltabstand neu definiert werden.
Temperaturdrift [%]:
Induktive Distanzsensoren haben einen Temperaturdrift, der am Ausgangssignal einen Drift von etwa +-5% ausmacht.
Ansprechzeit [ms]:
Die Ansprechzeit beträgt typischerweise wenige Millisekunden.
Schaltfrequenz [Hz]:
Die Schaltfrequenz steht im Zusammenhang mit der Ansprechzeit. Sie gibt an, in welchen zeitlichen Abständen 1/f der Messwert aktualisiert wird. Ist beispielsweise bei Abstandsmessungen von bewegten Objekten die Messfrequenz zu tief, so bestimmt diese letztlich die Auflösung des Messsystems Auflösung = vObjekt x 1/Messfrequenz (s = v x t).
Betriebsspannung [V]:
Bei den meisten Sensoren können Betriebsspannungen von 10 bis 30 Volt angeschlossen werden. Sensoren mit eingebautem Netzteil können mit 10 DC bis 220V AC betrieben werden.
Ausgangssignal [V], [A]:
Das analoge Ausgangssignal kann je nach Sensortyp bis zur Speisespannung steigen. Es gibt auch Ausführungen mit einem Stromausgang von 4 bis 20mA.
Ansteuerung
-
Anwendungsgebiete
Fertigungsanlagen
Steuerungstechnik
Drehzahlmessung
Positionieraufgaben
Literaturhinweise
- Mechatronik Komponenten Methoden Beispiele, ISBN 3-446-40599-2
Verbindungsmöglichkeiten induktiver Sensor
| Aktortyp | Bemerkung zur Kombination |
|---|---|
| Magnetostriktiv | |
| Piezo | Kann im Bereich der Drehzahlmessung oder zur Ermittlung einer Endanschlagsfahrt verwendet werden. Für eine direkte lineare Messung muss auf die Nichtlinearität des Sensors geachtet werden. Dieser Sensor eignet sich auch für statische Anwedungen. |
| Synchronmotor | Kann im Bereich der Drehzahlmessung oder zur Ermittlung einer Endanschlagsfahrt verwendet werden. Für eine direkte lineare Messung muss auf die Nichtlinearität des Sensors geachtet werden. Dieser Sensor eignet sich auch für statische Anwedungen. |
| Asynchronmotor | Kann im Bereich der Drehzahlmessung oder zur Ermittlung einer Endanschlagsfahrt verwendet werden. Für eine direkte lineare Messung muss auf die Nichtlinearität des Sensors geachtet werden. Dieser Sensor eignet sich auch für statische Anwedungen. |
| Schrittmotor | Kann im Bereich der Drehzahlmessung oder zur Ermittlung einer Endanschlagsfahrt verwendet werden. Für eine direkte lineare Messung muss auf die Nichtlinearität des Sensors geachtet werden. Dieser Sensor eignet sich auch für statische Anwedungen. |
| Linearmotor | Kann zur Ermittlung einer Endanschlagsfahrt verwendet werden. Für eine direkte lineare Messung muss auf die Nichtlinearität des Sensors geachtet werden. Dieser Sensor eignet sich auch für statische Anwedungen. |
| Tauchspulenmotor | Kann zur Ermittlung einer Endanschlagsfahrt verwendet werden. Für eine direkte lineare Messung muss auf die Nichtlinearität des Sensors geachtet werden. Dieser Sensor eignet sich auch für statische Anwedungen. |
| Smart-Materials | Die Verformung eines ferromagnetischen Materials kann beobachtet werden. |
Verbindungsmöglichkeiten induktiver Sensor
| Controllertyp | Bemerkung zur Kombination |
|---|---|
| ASIC | Integrierte Schaltung kann gut an Sensor angepasst werden. |
| SPS | Sensorsignal wird üblicherweise über die digitale Schnittstelle (digitale Eingänge) eingelesen. |
| Prozessrechner | Sensorsignal wird üblicherweise über die digitale Schnittstelle (digitale Eingänge) eingelesen. |
| Microcontroller | Sensorsignal kann sowohl über als digitales oder auch als anlaloges Signal eingelesen werden. Bei beiden Signaltypen muss der Signalpegel auf 3.3Volt heruntergeteilt werden. |
| Industrie-PC | Sensorsignal kann über geeignete Schnittstelle eingelesen werden. Signalamplitude muss angepasst werden. |
Verbindungsmöglichkeiten induktiver Sensor
| Identifikationstyp | Bermerkung zur Kombination |
|---|---|
| Barcode | |
| 2D-Code | |
| RFID | Es gibt Ansätze für RFID-Tags, die über einen Sensoreingang Sensorwerte speichern können. Somit werden bei einem Identifikationsvorgang auch Attribute wie beispielsweise Maximal-, Minimal- oder Durchschnittssensorwerte übertragen. |
| Magnetisch | |
| Bildverarbeitung | |
| Elektro-Mechanisch |
Verbindungsmöglichkeiten induktiver Sensor
| Kommunikationstyp | Bemerkung zur Kombination |
|---|---|
| ASI | Kommuniziert in der Regel über den ASI-Bus mit einer SPS. Dabei werden hauptsächlich binäre und durch Erweiterungen auch analoge Werte übertragen. |
| CAN | Mit einer digitalen Schnittstelle können die Sensordaten über einen CAN-Bus weitergeleitet werden. Somit bleiben grosse Kabelbäume erspart. |
| Profibus | Mit einer digitalen Schnittstelle können die Sensordaten über einen Profibus weitergeleitet werden. Vor allem ürsprünglich analoge Signale können ohne Einflüsse wie Spannungsabfall oder Induzierte Spannungen über weite Distanzen trasportiert werden. |
| Industrial Ethernet / Profinet | Mit dem industrial Ethernet können Sensorsignale über grosse Distanzen transportiert werden. Somit können Sensoren ferngesteuert und ferngewartet werden. |