Fotoelektrisch
Grundeigenschaften
Fotoelektrische Sensoren machen sich für ihre Funktionsweise je nach Anwendungsbereich sichtbares Licht, oder nicht sichtbares Licht (z.B. Infrarot-Licht) zu Nutze. Die Anwendungsbereiche reichen von der einfachen Lichtschranke, die durch ein Unterbrechen des Lichtstrahls ein Signal auslöst, bis hin zur Distanzmessung mit sehr grosser Auflösung. Ein fotoelektrischer Sensor besteht mindestens aus einem Licht-Empfänger. Dazu dient ein sogenannter Sender als Lichtquelle und wird je nach Bauform im gleichen Gehäuse wie der Empfänger untergebracht, oder auch in einer externen Einheit verlagert.
 {.imgcenter}
{.imgcenter}
Bauformen
Lichtschranke
Einer der bekanntesten fotoelektrischen Sensoren ist die Lichtschranke. Diese ermöglichen das Vorhandensein eines Objektes zu erfassen. Dabei wird zwischen der Einweg- oder Reflektionslichtschranke unterschieden.
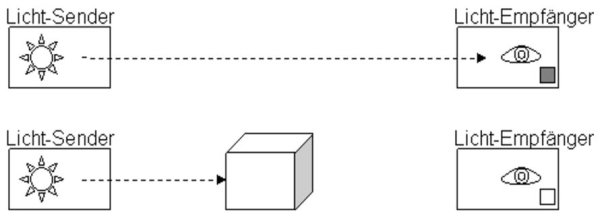
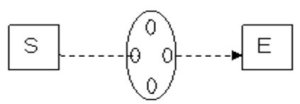
Einweglichtschranke:
Bei dieser Bauform wird vom Sender ein Lichtstrahl zum Empfänger ausgesendet. Wird der Lichtstrahl unterbrochen, wird dies am Empfänger signalisiert. Diese Bauform wird im Alltag oft bei Garagentoren verwendet. In miniaturisierter Ausführung und in Kombination mit einer Lochscheibe, wird die Sender- Empfängeranordnung auch bei Drehgebern verwendet.

Bildquelle: www.baumerelectric.ch
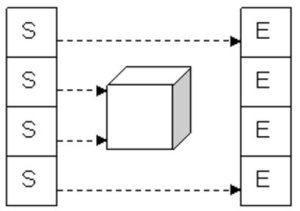
Lichtvorhang:
Der Lichtvorhang ist eine Erweiterung der oben aufgeführten Bauform. Hier wird eine Lichtfläche aufgespannt. Somit kann mit einer Auflösung (abhängig von Anzahl Sender und Empfänger) die Position oder Grösse eines Objektes erfasst werden.

Bildquelle: www.cedes.com
Diese Anordnung wird beispielsweise in Paketsortieranlagen oder im Bereich der Lifttüren eingesetzt.
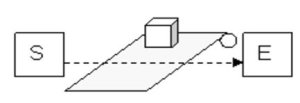
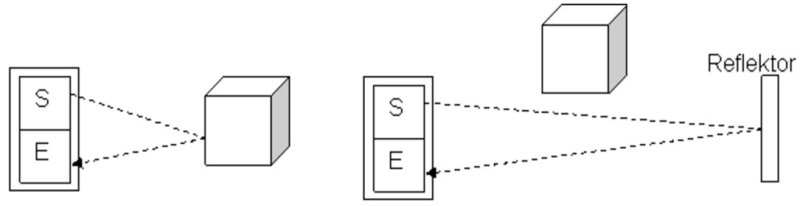
Reflektionslichtschranke:
Bei der Reflektionslichtschranke wird der Sender und Empfänger im gleichen Gehäuse untergebracht. Auch hier wird vom Sender ein Lichtstrahl ausgesendet. Dieser kann an einer reflektierenden Oberfläche eines Objektes zum Empfänger reflektiert werden. Bei nichtreflektierenden Oberflächen kann ein Reflektor Abhilfe leisten. Dabei unterbricht das Objekt den Lichtstrahl.

Bildquelle: www.baumerelectric.ch
Abstandsmessung
Photoelektrische Sensoren können auch für Abstandsmessungen eingesetzt werden. Hierbei wird ein Laserstrahl verwendet. Die Auswertung der Distanz kann durch drei verschiedene Auswerteprinzipien erfolgen, und zwar durch die Messung der Lichtlaufzeit, die Messung der Phasenlage oder durch Triangulation.
Messung der Lichtlaufzeit:
Bei diesem Auswerteprinzip wird die Laufzeit zwischen dem Aussenden des Lichtstrahls und dem Wiedereintreffen des reflektierten Lichts gemessen. Da die Lichtgeschwindigkeit sehr gross ist und folglich die Laufzeiten sehr klein ausfallen, können mit diesem Prinzip Messbereiche ab einem Meter bis mehrere Kilometer abgedeckt werden. Wobei bei grossen Distanzen nicht mehr mit dem Reflektionsprinzip gearbeitet werden kann.
Messung der Phasenlagen:
Dieses Auswerteprinzip misst die Phasenverschiebung zweier periodischen Signale, dem gesendeten und dem empfangenen Lichtstrahls. Dieses Auswerteprinzip ist gegenüber der Lichtlaufzeitmessung viel günstiger zu realisieren und bietet zudem eine höhere Auflösung. Die Nachteile sind, dass das Prinzip nur Messdistanzen bis zu 200m verträgt, nur eine relative Änderung ausgibt und dass bei einer Phasenverschiebung eines Vielfachen der Modulationswellenlänge keine eindeutige Auswertung erfolgen kann.
Robuste Messverfahren bestehen aus einer Kombination der Lichtlaufzeit- und Phasenlagenmessung. So können auch Absolutwerte ausgegeben werden.
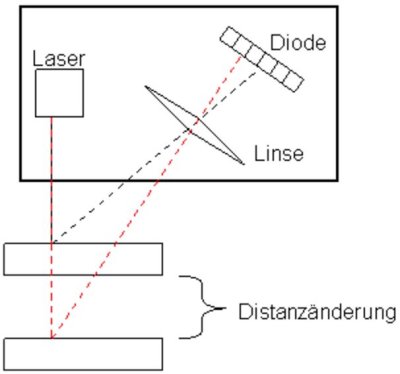
Triangulation:
Ein weiteres Auswerteprinzip für die Abstandsmessung ist die Triangulation. Der Sensor besteht hierbei aus einer Laserlichtquelle, eines Objektivs und einer Photodiodenzeile (aneinander gereihte Dioden, vergleichbar mit dem Bildsensor einer Digitalkamera). Das Laserlicht wird vom zu messenden Objekt durch die Objektivlinse in einem bestimmten Winkel zur Diode geleitet. Erfolgt eine Abstandsänderung des Messobjektes, so ändert auch der Einfallswinkel des Laserlichtstrahls. Dies führt dazu, dass der auftreffende Lichtpunkt entlang der Photodiodenzeile seine Position ändert. Dies gibt Rückschluss auf die Distanz, oder Distanzänderung des Objektes. 1um bis 100m.

Bildquelle: www.baumerelectric.ch
Aufbau und Funktionsweise
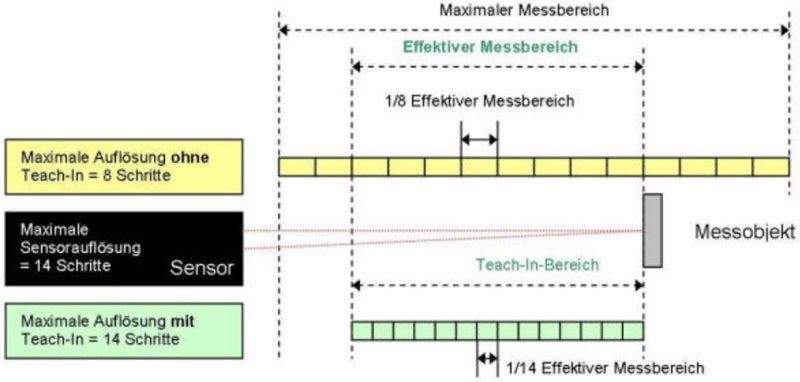
Teach-In-Funktion:
Bei optischen Abstandssensoren mit einer Teach-In-Funktion muss folgendes beachtet werden. Der effektiv zu messende Bereich kann innerhalb des maximalen Messbereichs mit der Teach-In-Funktion begrenzt werden. Die Analogausgabe hat ihren vollen Hub und Auflösung innerhalb dieses geteachten Bereichs. Auflösung und Linearität verändern sich bei Veränderungen des Messbereichs. Je näher der Fernpunkt des Messbereichs am Sensor liegt, desto besser ist die Auflösung.
 {.imgcenter}
{.imgcenter}
Kenngrössen
Messdistanz [mm]:
Die Messdistanz wird immer mit einer minimalen und einer maximalen Distanz angeben. Praktisch alle Sensoren haben einen Blindbereich im Messbereich. Je nach Sensortyp bewegen sich die Werte zwischen wenigen Millimeter bis zu 100 Metern.
Messauflösung [mm]:
Die Messauflösung kann bei zunehmender Messdistanz abnehmen. Diese Angabe wird im Datenblatt anhand eines Diagramms dargestellt. Je nach Mess- und Teach-In-Bereich beträgt die Auflösung zwischen 0.005 mm bis 2mm.
Linearitätsabweichung [mm]:
Mit zunehmender Messauflösung nimmt der Linearitätsfehler zu. Diese Angabe wird im Datenblatt anhand eines Diagramms dargestellt. Genaue Sensoren weisen Linearitätsabweichungen im Bereich von +-0.015mm auf.
Messfrequenz [Hz]:
Die Messfrequenz f gibt an, in welchen zeitlichen Abständen 1/f der Messwert aktualisiert wird. Je nach Messverfahren und Messabstand betragen die Messfrequenzen wenige Herz bis zu 500kHz. Ist bei Abstandsmessungen von bewegten Objekten die Messfrequenz zu tief, so bestimmt diese letztlich die Auflösung des Messsystems Auflösung = vObjekt x 1/Messfrequenz (s = v x t).
Ansteuerung
Die Distanzangabe kann anhand eines analogen Signals oder einer Seriellen Schnittstelle (RS485) ausgelesen werden. Bei gewissen Modellen kann der Messbereich definiert werden.
Anwendungsgebiete
Werden praktisch in allen Bereichen eingesetzt.
Verbindungsmöglichkeiten fotoelektrischer Sensor
| Aktortyp | Bemerkung zur Kombination |
|---|---|
| Magnetostriktiv | |
| Piezo | Kann für die Beobachtung verschiedener Verformungen eingesetzt werden. |
| Synchronmotor | Kann als einfacher Endanschlagsschalter dienen. Im Bereich der linearen und rotativen Bewegung wird es auch für die absolute und relative Positionsermittlung verwendet. |
| Asynchronmotor | Kann als einfacher Endanschlagsschalter dienen. Im Bereich der linearen und rotativen Bewegung wird es auch für die absolute und relative Positionsermittlung verwendet. |
| Schrittmotor | Kann als einfacher Endanschlagsschalter dienen. Im Bereich der linearen und rotativen Bewegung wird es auch für die absolute und relative Positionsermittlung verwendet. |
| Linearmotor | Kann als einfacher Endanschlagsschalter dienen oder auch für die absolute und relative Positionsermittlung. |
| Tauchspulenmotor | Kann als einfacher Endanschlagsschalter dienen oder auch für die absolute und relative Positionsermittlung. |
| Smart-Materials | Kann für die Beobachtung verschiedener Verformungen eingesetzt werden. |
Verbindungsmöglichkeiten fotoelektrischer Sensor
| Controllertyp | Bemerkung zur Kombination |
|---|---|
| ASIC | Integrierte Schaltung kann gut an Sensor angepasst werden. In der Regel treibt ein ASIC die Lichtquelle selbst an und kann somit Fremdlichteinwirkungen abfangen. |
| SPS | Wird Üblicherweise als Einweg- oder Zweiweglichtschranke. Im Zusammenhang mit Drehzahlreglermodulen werden auch Quadratursignale von Drehencodern eingelesen. |
| Prozessrechner | Sensorsignal kann sowohl analog als auch digital eingelesen werden. |
| Microcontroller | Sensorsignal kann sowohl analog als auch digital eingelesen werden. Signalpegel muss unter Umständen auf 3.3 Volt heruntergeteilt werden. |
| Industrie-PC | Sensorsignal kann sowohl analog als auch digital eingelesen werden. Beachte Singalpegelanpassungen. |
Verbindungsmöglichkeiten fotoelektrischer Sensor
| Identifikationstyp | Bermerkung zur Kombination |
|---|---|
| Barcode | |
| 2D-Code | |
| RFID | Es gibt Ansätze für RFID-Tags, die über einen Sensoreingang Sensorwerte speichern können. Somit werden bei einem Identifikationsvorgang auch Attribute wie beispielsweise Maximal-, Minimal- oder Durchschnittssensorwerte übertragen. |
| Magnetisch | |
| Bildverarbeitung | |
| Elektro-Mechanisch |
Verbindungsmöglichkeiten fotoelektrischer Sensor
| Kommunikationstyp | Bemerkung zur Kombination |
|---|---|
| ASI | Kommuniziert in der Regel über den ASI-Bus mit einer SPS. Dabei werden hauptsächlich binäre und durch Erweiterungen auch analoge Werte übertragen. Für die Übertragung von Quadratursignalen ist auch ein Erweiterungsmodul nötig. |
| CAN | Mit einer digitalen Schnittstelle können die Sensordaten über einen CAN-Bus weitergeleitet werden. Somit bleiben grosse Kabelbäume erspart. Für die direkte Übertragung von Quadratursignalen ist es nicht geeignet. |
| Profibus | Mit einer digitalen Schnittstelle können die Sensordaten über einen Profibus weitergeleitet werden. Vor allem ürsprünglich analoge Signale können ohne Einflüsse wie Spannungsabfall oder Induzierte Spannungen über weite Distanzen trasportiert werden. |
| Industrial Ethernet / Profinet | Mit dem industrial Ethernet können Sensorsignale über grosse Distanzen transportiert werden. Somit können Sensoren ferngesteuert und ferngewartet werden. Für die direkte Übertragung von Quadratursignalen ist es nicht geeignet. |