Schritt-Motor
Grundeigenschaften
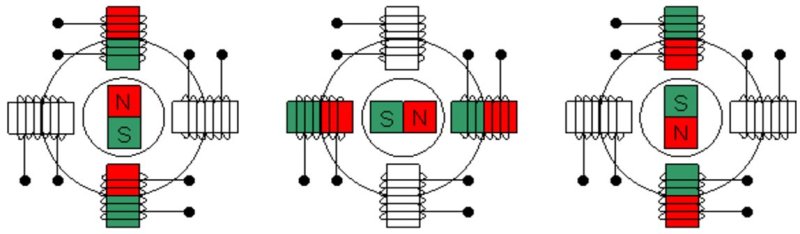
Der Schrittmotor ist prinzipiell ein Synchronmotor, bei dem ein schrittweise änderndes elektrisches Feld in den Statorspulen, den Rotor zum Rotieren bringt. Der Rotor folgt theoretisch genau dem aussen angelegten Feld. Diese Funktionsweise kann in einem vereinfachten Modell veranschaulicht werden: Der Rotor besteht aus einem Permanentmagneten. Der Stator besitzt in diesem Beispiel vier Spulen. Werden jeweils nur die gegenüberliegenden Spulen angeregt, entspricht diese Ansteuerung einem Vollschrittmodus. Hierbei benötigt der Motor 4 Schritte pro Umdrehung.
 {.imgcenter}
{.imgcenter}
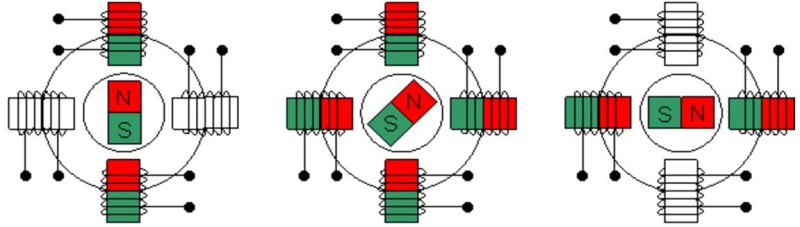
Im Halbschrittmodus werden auch die benachbarten Spulen angeregt. Dies hat eine Erhöhung der Schrittauflösung zur Folge. Somit benötigt der Motor 8 Schritte pro Umdrehung und weist logischerweise auch eine harmonischere Drehbewegung auf.
 {.imgcenter}
{.imgcenter}
Bauformen
Permanentmagnetmotor
Im obigen Beispiel ist ein Permanentmagnetmotor abgebildet. Da der Rotor aus einem Permanentmagnet besteht, erfährt man beim Drehen der Motorachse bei ausgeschaltetem Strom ein Rastmoment. Ein Motor in dieser Form zeichnet sich zwar durch eine grosse Kraft aus, besitzt aber eine sehr grosse Schrittweite, sprich eine kleine Auflösung.
Reluktanzmotor
Im Reluktanzmotor ist kein Permanentmagnet vorhanden, hier besteht der Rotor aus einem gezahnten Weicheisenkern und weist somit auch kein Rastmoment auf. Bei diesem Motor sind die Drehmomente kleiner als beim Permanentmagnetmotor. Werden die Spulen angeregt, fliess der magnetische Fluss durch den Weicheisenkern. Die Drehbewegung des Rotors kommt zustande, weil vom gezahnten Stator der nächstliegende Zahn des Rotors angezogen wird. Dank der relativ feinen Verzahnung entsteht eine gleichmässige Drehbewegung.
 {.imgcenter}
{.imgcenter}
Hybridmotor
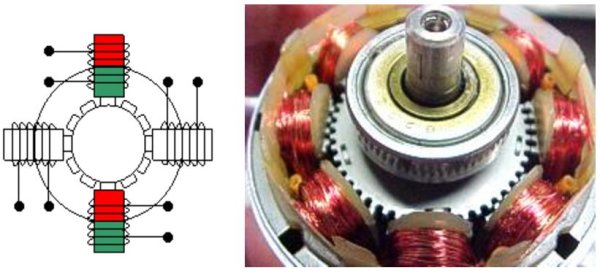
Der Hybridmotor besteht aus einer Kombination des Permanentmagnetmotors und des Reluktanzmotors. Es vereint die Eigenschaften beider Bauformen, indem die Pole des Permanentmagneten durch einen gezahnten Weicheisenkranz erweitert werden. Nahezu alle heute erhältlichen Schrittmotoren sind Hybridmotoren.
 {.imgcenter}
Bildquelle: www.useddlt.com
{.imgcenter}
Bildquelle: www.useddlt.com
Aufbau und Funktionsweise
Schaltungsarten
Die Schrittmotoren besitzen nicht etwa wie ein DC-Motor zwei Anschlüsse. Mindestens vier Anschlüsse benötigt ein Schrittmotor, um eine Umdrehung auszuführen.
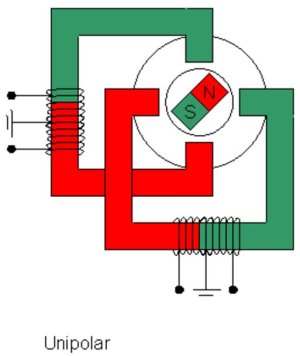
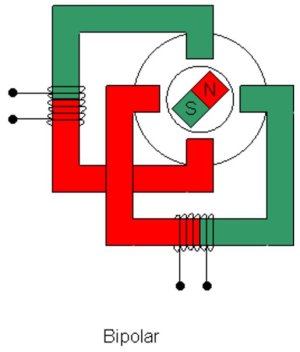
Unipolar / Bipolar
Die Bezeichnung Bipolar/Unipolar bezieht sich auf die Spulenbeschaltung des Motors.
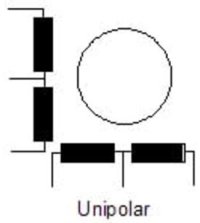
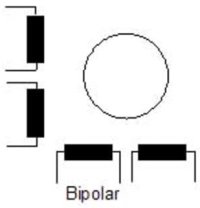
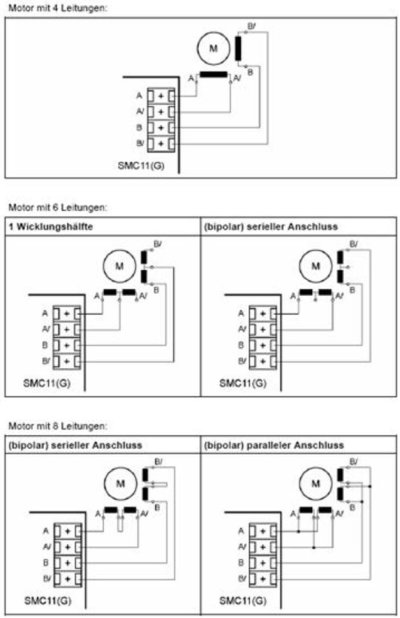
Der unipolare Schrittmotor kommt mit einer Spule mit je einem Mittelabgriff pro Seite aus. Somit erfoglt die Umpolung des Stators indem am einen oder anderen Anschluss der Spule eine Spannung angelegt wird. Der Strom fliesst über den Mittelabgriff ab. Die bipolaren Motoren besitzen zwei separate Spulen pro Seite. Somit erscheinen sie in der Praxis auch mit 8 Anschlüssen. Da zwei Wicklungen vorhanden sind, bietet sich die Möglichkeit an, diese parallel oder in Serie zu verschalten. Diese Verschaltungsart hat natürlich auch einen Einfluss auf die Stromaufnahme und letztendlich auf die Fahreigenschaften des Motors. Für die Spannungsumkehrung muss hier (da kein Mittelabgriff vorhanden ist) die ganze Spule umgepolt werden.
Bildquelle: www.motionstep.de
Parallel
In dieser Schaltung wird die höchste Motorleistung erzielt. Durch die geringe Induktivität hält der Motor auch bei höheren Drehzahlen das Moment noch konstant, allerdings ist auch ein hoher Phasenstrom erforderlich.
Seriell
Diese Schaltung ist für den unteren Drehzahlbereich geeignet, wo mit geringem Strom ein hohes Drehmoment erreicht wird. Aufgrund der hohen Induktivität fällt das Drehmoment aber bei höheren Drehzahlen schnell ab. Die untenstehende Grafik zeigt auf, wie die Motorenanschlüsse verschaltet werden können.
 {.imgcenter}
{.imgcenter}
Bildquelle: www.nanotec.de
Schrittverlust
Überschreitet die Last das maximale Drehmoment des Motors, kommt es zu Schrittverluste. Diese können auch durch hochdynamischen Fahrprofilen wie ein plötzlicher Richtungswechsel oder einer zu steilen Anfahrrampe hervorgerufen werden. Demnach erreicht ein Schrittmotor seine maximale Drehzahl nur wenn die Schrittfrequenz auf angepasster Weise hochgefahren wird. Das gleiche gilt auch beim Abbremsen. Wenn bei hohen Drehzahlen (kleines Drehmoment) nur ein einziger Schritt verloren geht, bleibt der Rotor so lange stehen (beinahe kraftlos), bis die Schrittfrequenz im Stator wieder so tief ist, dass der Rotor wieder synchron mitdrehen kann. Dieser vermeintliche Nachteil zeichnet sich im Falle einer Kollision am Antriebsstrang als Vorteil aus.
Kenngrössen
Phasenzahl:
Gebräuchlich sind Schrittmotoren mit ein bis fünf Phasen. Einphasige Motoren haben in der klassischen Antriebstechnik eine geringe Bedeutung. Die größte Verbreitung hat der 2-Phasenmotor mit seinen Varianten gefunden. Ein 4-Phasen Schrittmotor ist im Grunde ein 2-Phasenmotor mit getrennt herausgeführten Wicklungsanschlüssen. 5-Phasen Schrittmotoren bieten ein besseres Laufverhalten und eine von Natur aus höhere Schrittauflösung. Relativ neu auf dem Markt befindet sich der 3-Phasen Schrittmotor.
Schrittwinkel [°]:
Der Schrittwinkel gibt an, um wie viel Grad sich Rotor bei einem einzelnen Voll-Schritt dreht. Dieser Drehwinkel hat einen direkten Zusammenhang mit der Schrittzahl pro Umdrehung. Handelsübliche Motoren besitzen 100 oder 200 Schritte pro Umdrehung. Dies entspricht einem Drehwinkel von 1,8° (@200 Schritte). Diese Auflösung erhöht sich im ½-Schritt, ¼-Schritt und 1/8-Schrittmodus. Um im Halbschrittmodus die gleiche Drehzahl wie im Vollschrittmodus zu erreichen, muss der Treiber mit der doppelten Frequenz angesteuert werden.
Drehmoment [Nm]:
Da der Schrittmotor über die Drehzahl ein unkonstanter Drehmomentverlauf aufweist, liegt diese Angabe meistens in Form von einer Kennlinie vor. Wenn keine Kennlinie vorliegt werden im Datenblatt lediglich Maximalwerte angegeben. Bei der Auslegung eines Motors muss somit unbedingt ein Reservefaktor einberechnet werden. Denn beim Überschreiten des maximalen Drehmomentes verliert der Motor die Schritte.
Haltemoment [Nm]:
Das Haltemoment gibt an, welches Moment der Motor im Stillstand aufbringt. Dieser Wert kann in der Regel auch als Richtwert für kleine Drehzahlen verwendet werden. Im Stillstand verfügt der Schrittmotor über das grösste Drehmoment.
Selbsthaltemoment [Nm]:
Das Selbsthaltemoment gibt an, wie stark die Rasterung des Permanentmagneten ist.
Phasenstrom (I) [A]:
Der Phasenstrom bezieht sich auf das Nennmoment des Motors. Dieser Strom kann im Allgemeinen auch dem Dauerstrom gleichgesetzt werden. Im Stillstand fliesst der grösste Strom, welcher auch das grösste Moment (Haltemoment) erzeugt. Bei steigender Drehzahl nimmt (auf Grund der steigenden Gegeninduktivität in den Spulen) der Phasenstrom ab. Um den Motor nicht unnötig thermisch zu belasten, wird im Stillstand in vielen Anwendungen eine Stromabsenkung vorgenommen. Ein halber Haltestrom führt zu einem halben Haltemoment.
Wicklungswiderstand (R) [Ohm]:
Dieser Wert dient als Anhaltspunkt zur Berechnung der ohmschen Verluste im Motor.
Wicklungsinduktivität (L) [mH]:
Die Induktivität beeinflusst die Geschwindigkeit des Stromauf- und Abbaus. Diese Beeinflussung kommt meistens bei höheren Drehzahlen zum Vorschein und bestimmt somit die dynamischen Eigenschaften des Motors.
Bei einer hohen Wicklungsinduktivität erzeugt der Motor beim Drehen eine Gegenspannung/Induktionsspannung in den Spulen, die dem Phasenstrom entgegenwirkt und mit steigender Drehzahl zunimmt. Diese Spannung ist auch proportional zum Phasenstrom. Das heisst, hohe Drehzahlen werden nur erreicht, indem der Phasenstrom tief gehalten wird.
Nennspannung (U) [V]:
Die Nennspannung gibt an, mit welcher Spannung der Motor im Stillstand zu speisen ist, um den Phasenstromnennwert zu erreichen. Sie ist bei Konstantstrom-Ansteuerung nicht mit der Betriebsspannung zu verwechseln. Die meisten Leistungstreiber arbeiten mit einer Konstantstrom-Ansteuerung. Um den Strom konstant zu halten, wird wegen der Induktivität und deren Gegenspannung mit einer Anschlussspannung (>Nennspannung) entgegengewirkt.
| Wert | 1 Wicklungshälfte | seriell | parallel |
|---|---|---|---|
| Widerstand |  |
 |
 |
| Induktivität |  |
 |
 |
| Phasenstrom |  |
 |
 |
| Haltemoment |  |
 |
|
Rotorträgheitsmoment:
Das Rotorträgheitsmoment und das Trägheitsmoment der Last zusammen, bestimmen die maximale mögliche Beschleunigung des Motors. Diese Angabe wird in dynamischen Fällen für die Berechnung des Antriebes benötigt.
Motortemperatur, Wicklungstemperatur:
Die maximal zulässige Motoren- oder Wicklungstemperatur darf nicht über längere Zeit überschritten werden. Bei einer Überschreitung leidet hauptsächlich das Magnetmaterial, der Isolierlack der Motorwicklung und die Motorlager darunter.
Ansteuerung
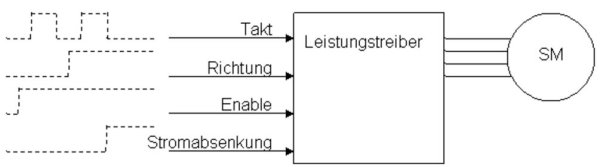
Die Komplexität einen Schrittmotor anzusteuern hängt stark davon ab, von welcher Ansteuerungsebene aus auf den Motor zugegriffen wird. Grundsätzlich muss jede einzelne Spule mit einer definierten Abfolge angeregt werden. Je nach Abfolge und Kombination bewegt sich der Motor in Voll-, Halb, Viertel- oder Achtel-Schritte. Diese Verschaltung der Spulen wird in den meisten Fällen von einem Schrittmotor-Leistungstreiber übernommen. Diese benötigen für die Ansteuerung eigentlichen Bewegung grundsätzlich zwei TTL-Signale: Takt und Richtung. Im Takteingang wird ein Rechtecksignal (Pulsfolge) eingespiesen. Die Frequenz dieses Signals bestimmt die Geschwindigkeit der Spulenabfolge. Bei jedem Puls führt der Leistungstreiber einen Wechsel der Spulenanregung aus. Im Richtungseingang wird mit dem Signalzustand (HIGH oder LOW) die Drehrichtung bestimmt. Weitere Eingänge für die Ansteuerung sind das Enable und die Stromabsenkung. Mit dem Enable wird die Bestromung der Spulen freigegeben. Um Thermische Probleme zu vermeiden kann mit der Stromabsenkung im Motorstillstand der Haltestrom reduziert werden.
 {.imgcenter}
{.imgcenter}
Anwendungsgebiete
Die Schrittmotoren finden ihren Einsatz in Druckern, in Werkzeugmaschinen, im Lesekopf für CD-Laufwerke und in Anwendungen bei denen bei tiefen Drehzahlen hohe Dreh- und Haltemomente benötigt werden.
Literaturhinweise
Verbindungsmöglichkeiten Schritt-Motor
| Sensortyp | Bemerkung zur Kombination |
|---|---|
| Kapazitiv | Kann im Bereich der Drehzahlmessung oder für eine Endanschlagsfahrt verwendet werden. |
| Induktiv | Kann im Bereich der Drehzahlmessung oder für eine Endanschlagsfahrt verwendet werden. |
| Magnetostriktiv | Nicht geeignet. |
| Piezo | Nicht geeignet. |
| Potentiometrisch | Kann als Winkelgeber eingesetzt werden. |
| DMS | Nicht geeignet. |
| Fotoelektrisch | Kann im Bereich der Drehzahlmessung, Endanschlagsfahrt oder als Winkelgeber verwendet werden. |
| Ultraschall | Nicht geeignet. |
| Magnetisch | Kann im Bereich der Drehzahlmessung oder als Winkelgeber verwendet werden. |
Verbindungsmöglichkeiten Schritt-Motor
| Controllertyp | Bemerkung zur Kombination |
|---|---|
| ASIC | Kann über eine Leistungselektronik oder enstsprechendem Leistungstreiber angesteuert werden. |
| SPS | Kann über entsprechendem Funktionsmodul angesteuert werden. |
| Prozessrechner | Kann über entsprechendem Leistungstreiber angesteuert werden. |
| Microcontroller | Kann über entsprechendem Leistungstreiber oder Elektronik angesteuert werden. |
| Industrie-PC | Kann über entsprechendem Leistungstreiber angesteuert werden. |
Verbindungsmöglichkeiten Schritt-Motor
| Identifikationstyp | Bermerkung zur Kombination |
|---|---|
| Barcode | Zurzeit keine Kombination bekannt |
| 2D-Code | Zurzeit keine Kombination bekannt |
| RFID | Zurzeit keine Kombination bekannt |
| Magnetisch | Zurzeit keine Kombination bekannt |
| Bildverarbeitung | Zurzeit keine Kombination bekannt |
| Elektro-Mechanisch | Zurzeit keine Kombination bekannt |
Verbindungsmöglichkeiten Schritt-Motor
| Kommunikationstyp | Bemerkung zur Kombination |
|---|---|
| ASI | Kommuniziert in der Regel über den ASI-Bus mit einer SPS. Dabei werden hauptsächlich binäre und durch Erweiterungen auch analoge Werte übertragen. Eine direkte Frequenzübertragung für das Taktsignal ist nicht möglich. |
| CAN | Mit einer digitalen Schnittstelle können die Daten über einen CAN-Bus weitergeleitet werden. Somit bleiben grosse Kabelbäume erspart. |
| Profibus | Mit einer digitalen Schnittstelle können die Steuerdaten über einen Profibus weitergeleitet werden. Vor allem ürsprünglich analoge Signale können ohne Einflüsse wie Spannungsabfall oder Induzierte Spannungen über weite Distanzen trasportiert werden. |
| Industrial Ethernet / Profinet | Mit dem industrial Ethernet können Steuersignale über grosse Distanzen transportiert werden. Somit können Aktoren ferngesteuert und ferngewartet werden. |