Allgemein
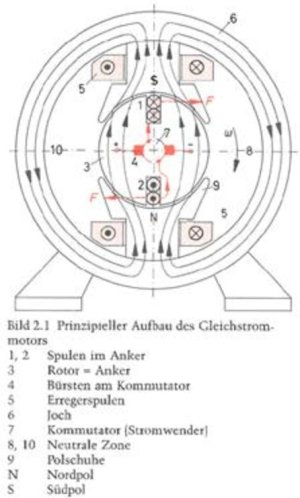
Einführung
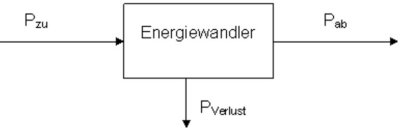
Aktoren verrichten eine mechanische Arbeit und stellen somit die Muskeln eines mechatronischen Systems dar. Ihre Aufgabe ist es etwas zu Bewirken, oft gilt es eine Bewegung auszuführen. Die verrichtete Arbeit erscheint in den meisten Fällen als Linearbewegung, Rotationsbewegung oder auch als Vibrationsbewegung. Ein Aktor kann als Energieumwandler dargestellt werden.
 {.imgcenter}
{.imgcenter}
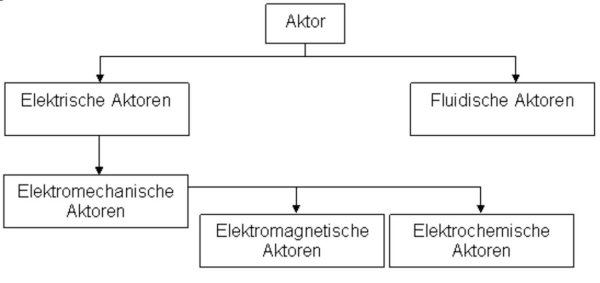
Prinzipien
Allgemeine Übersicht:
 {.imgcenter}
{.imgcenter}
Elektromechanische Aktoren
Elektromechanische Aktoren benötigen eine elektrische Hilfsenergie. Eine grosse Hauptgruppe bilden die elektromagnetischen Aktoren. Zu diesen gehören:
Magnetostriktiv
Synchronmotor
Asynchronmotor
Schrittmotor
Linearmotor
Tauchspulenmotor
Nicht elektromagnetisch wirken der Piezoaktor und die Smart-Materials.
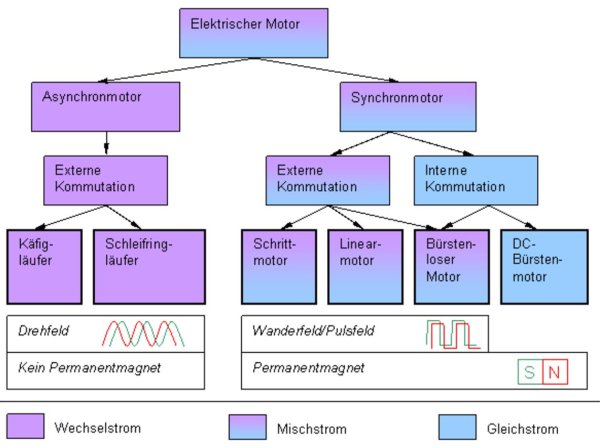
Wesentliche Eigenschaften
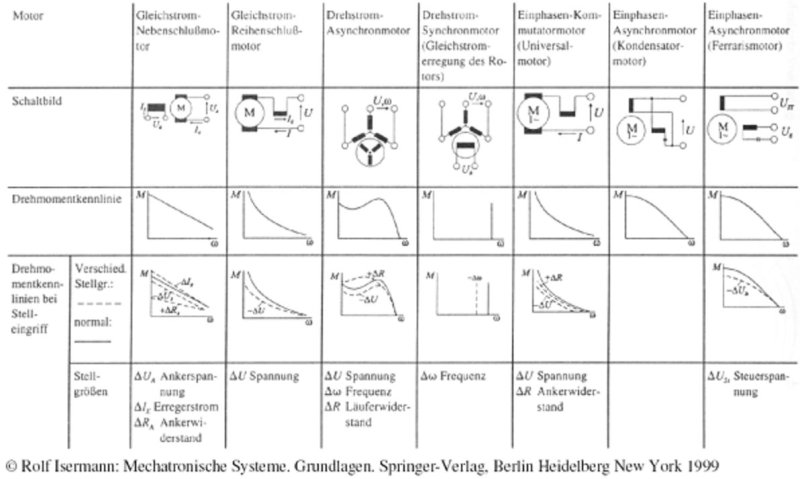
Übersicht Motorenwirkungsweise:
 {.imgcenter}
{.imgcenter}
Prinzipieller Aufbau der wichtigsten Elektromotoren:
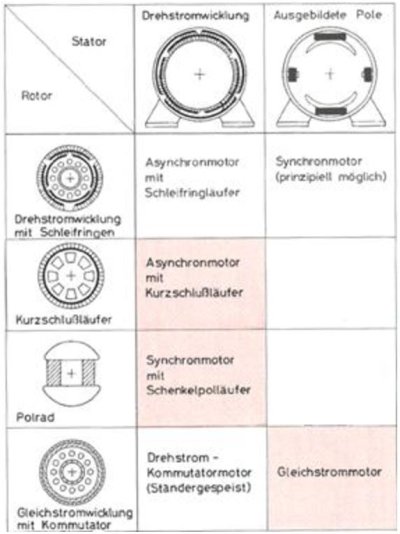 {.imgcenter}
{.imgcenter}
Bildquelle: Elektrische Antriebe, Vogel Fachbuch
Prinzipieller Aufbau eines Gleichstrommotors:
Prinzipieller Aufau eines Synchronmotors:

Bildquelle: Elektrische Anriebe, Vogel Fachbuch
 {.imgcenter}
{.imgcenter}
Fluidische Aktoren:
Pneumatik:
Ein pneumatischer Aktor erzeugt eine Bewegung durch Gasdruck (z.B. Luft)
Hydraulik:
Ein hydraulischer Aktor erzeugt eine Bewegung durch Flüssigkeitsdruck (z.B. Öl)
Neuartige Aktoren:
Smart-Materials
Anforderungen und Beschränkungen
| Vorteile | Nachteile | Anwendung | ||
|---|---|---|---|---|
| Magnetostriktiv | Verschleiss-frei. Braucht nicht in Stapelbau-weise hergestellt zu werden. | Kleine Hübe | Mikropositionierungen, Linearmotoren, rotatorische Antriebe, Servoventile, Einspritzventile in Fahrzeugen und die aktive Schwingungs-dämpfung | |
| Piezo | Grosse Kraft und Dynamik, verschleiss frei, einfaches Übertragungsverhältnis | Kleine Hübe, grosse Steuerspannungen, relativ grosse Baulänge | Massenspeicher, Halbleiter- und Mikroelektronik, Präzisionsbearbeitung, Life Science, Medizintechnik, Optik, Photonik und Nano-metrologie | |
| Synchronmotor | Drehzahl von Belastung unabhängig, hoher Wirkungsgrad, grosse Stellkräfte bei vergleichsweise kleinen Abmessungen | Schrittverlust, Anlauf-schwierigkeiten | Automation, Modellflug, Druckmaschinen, Verpackungsmaschinen, Textilmaschinen, Kunststoffmaschinen, Handling-maschinen, Sondermaschinen und im allgemeinen Maschinen-bau, * | |
| Asynchronmotor | Verschleissfrei, keine elektrischen Störfelder, robust | Schlupf | Pumpen-Antriebe, Kompressoren, Ventilatoren, Traktionsantriebe für Autos und Busse (Elektro- oder Hybridfahrzeuge), Werkzeugmaschinen-antriebe, Traktionsantriebe für Bahnen, Kettenzug-Antrieb | |
| Schrittmotor | Schrittweise Bewegung, grosse Haltekräfte, günstig, Drehzahl von Belastung unabhängig | Schrittverlust, Anlauf-Schwierigkeiten | Werkzeugmaschinen, Positioniersysteme | |
| Linearmotor | Dynamisch, grosse Stellwege | Teuer | Halbleiterfertigung Elektronik, Transporteinrichtungen Verpackungsmaschinen, Biomedizin, Life-Science, Reinraumanwendungen, Test- und Prüfautomaten für wissenschaftliche Zwecke, Wissenschaft, Forschung und Labor, Spezialmaschinen, Transrapid | |
| Tauchspulenmotor | Einfache Bauweise und Ansteuerung, hohe Dynamik | Kleine Stellkräfte | Halbleiterfertigung Elektronik, Biomedizin, Life-Science, Reinraumanwendungen, Test- und Prüfautomaten für wissenschaftliche Zwecke, Wissenschaft, Forschung und Labor,** | |
| Smart-Materials | Komplexe Bewegungen können ausgeführt werden | Kleine Stellkräfte | Medizinaltechnik, Implantate, Automatische Rohrankopplung, Weltraumforschung |
* Medizin- und Laborgeräte, Drehbare Werbung, Leucht-reklame, Grafische Licht-scheinwerfer, Getränke-automaten, Büromaschinen, Spielautomaten, Pumpen
** Spezialmaschinen, Druck- und Durchflussregelung, Optische Systeme (Fokussierung), Lichtstrahl-steuerung/-stabilisierung, Beatmungsgeräte, Fokussierung in der Endoskopie, Antriebe für XY-Tische
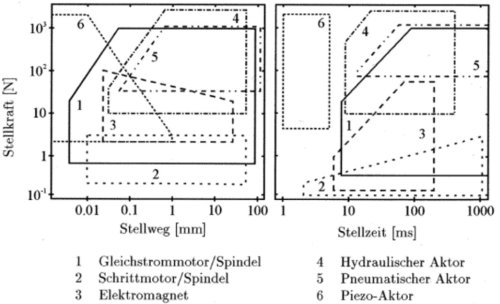
Kenngrössen
| Eigenschaften | Elektrische Leistung | Speisespannung | Strombedarf | Bewegungsart | Drehzahl | Drehmoment | Hub | Stellkraft |
|---|---|---|---|---|---|---|---|---|
| Magnetostriktiv | n.d. | n.d. | n.d. | Linear | - | - | Bis 50um | Bis 500N |
| Piezo | 1 - 80W | Bis 1500V | - | Rotation, Linear | - | - | 10um bis 1mm | Bis 30kN |
| Synchronmotor | 500000W | 12-130V | 2-200A | Rotation | Bis 9000 U/min | Bis 30 Nm | - | - |
| Asynchronmotor | Im Megawatt-bereich | n.d. | n.d. | Rotation | Nominell 750 bis 3000 U/min | n.d. | - | - |
| Schrittmotor | 1000W | Bis 72V | n.d. | Rotation | 20 - 20000 U/min | Bis 30 Nm | - | - |
| Linearmotor | 8000W Spitzen-leistung | Bis 240V | Bis 40A | Linear | - | - | Bis 1500mm | Bis 10kN |
| Tauchspulenmotor | 500 W Spitzen-leistung | Bis 50V | Bis 10A | Linear | - | - | 0.25 - 100mm | Bis 100N |
| Smart-Materials | - | - | Bis 2A | beliebig | - | - | - | n.d. |
 {.imgcenter}
{.imgcenter}
Bildquelle: Mechatronik, Heimann/Gerth/Popp, Fachbuchverlag Leipzig