Microcontroller
Grundeigenschaften
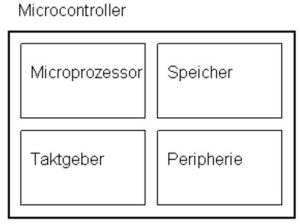
Microcontroller sind Einheiten, mit denen sowohl binäre als auch analoge Signale bearbeitet werden können. Die Befehle für den Prozessor werden vom Anwender üblicherweise in C-Code oder Assembler-Code programmiert. Der Microcontroller besteht im Wesentlichen aus einem Mikroprozessor, einem Speicher, einem Taktgeber und einer Peripherieeinheit.
Bauformen
Je nach Verwendungszweck gibt es verschiedene Ausführungen von Microcontrollern. Für eingebettete Systeme, sprich für Serienproduktionen, werden hauptsächlich mehrbeinige Chips eingesetzt. Für Anwendungen im Prototypenbau gibt es Controllervarianten mit nach aussen geführten, vergrösserten Anschlussklemmen. Für Schulungszwecke oder Rapidprototyping bieten einige Hersteller auch sogenannte Developer-Tool-Kits an, bei denen sämtliche Schnittstellenstecker, Kontroll-Leds, Eingabetasten und LCD-Display vorhanden sind.
Aufbau und Funktionsweise
Micorprozessor:
Der Mikroprozessor führt Befehle auf Bit-Ebene aus.
Speicher:
Im Speicher befinden sich das Anwendungsprogramm und die zwischengespeicherten Daten des Prozessors.
Taktgeber:
Wie es der Name Taktgeber erahnen lässt, gibt dieser den Takt für die Prozessorbefehlsausfühurngen an. Die Taktfrequenz wird vom eingesetzten Quarz bestimmt und befindet sich im Mega-Herz-Bereich.
Peripherie:
Die Peripherie erlaubt einen Datenaustausch zu anderen Geräten. Diese beinhaltet serielle Schnittstellen wie RS232 oder USB-Schnittstelle. Des Weiteren verfügt diese noch über digitale Ein- und Ausgänge sowie auch über Analog/Digitalwandler für die analoge Erfassung und Erzeugung von Signalen und LCD-Treiber.
Schaltungsarten
keine
Kenngrössen
Speisespannung:
3.3 oder 5 Volt
Speichergrösse:
256 kByte
Anzahl ADCs und DACs:
Analoge Eingänge sind verbreiteter als Analoge Ausgänge.
Bit-Auflösung der ADCs und DACs:
16 Bit
Anzahl digitale Ein- und Ausgänge:
Gehäuse und prozessorabhängig
Anzahl Pins:
Gehäuseabhängig
Schnittstellen:
Schnittstelle zu Programmiergerät (PC)
Taktfrequenz:
Mehrere MHz
Ansteuerung
Die Ansteuerung vom Computer erfolgt über eine standardisierte Schnittstelle Namens JTAG (Joint Test Action Group). Mit dieser werden das eigentliche Programm und die dazugehörenden Konfigurationen auf den Conroller geladen.
Anwendungsgebiete
Allgemeiner Prototypenbau
Robotik
Steuerungen
Elektronik
Verbindungsmöglichkeiten Microcontroller
| Sensortyp | Bemerkung zur Kombination |
|---|---|
| Kapazitiv | Über digitale Eingänge einlesbar |
| Induktiv | Über digitale Eingänge einlesbar |
| Magnetostriktiv | Über digitale Eingänge einlesbar |
| Piezo | Über digitale Eingänge einlesbar |
| Potentiometrisch | Über digitale Eingänge einlesbar |
| DMS | Über digitale Eingänge einlesbar |
| Fotoelektrisch | Über digitale/analoge Eingänge einlesbar |
| Ultraschall | Über digitale/analoge Eingänge einlesbar |
| Magnetisch | Über digitale/analoge Eingänge einlesbar |
Verbindungsmöglichkeiten Microcontroller
| Aktortyp | Bemerkung zur Kombination |
|---|---|
| Magnetostriktiv | Über externer Leistungsstufe ansteuerbar |
| Piezo | Über externer Leistungsstufe ansteuerbar |
| Synchronmotor | Über externer Leistungsstufe ansteuerbar |
| Asynchronmotor | Über externer Leistungsstufe ansteuerbar, eher unüblich |
| Schrittmotor | Über externer Leistungsstufe ansteuerbar |
| Linearmotor | Über externer Leistungsstufe ansteuerbar |
| Tauchspulenmotor | Über externer Leistungsstufe ansteuerbar |
| Smart-Materials | Über externer Leistungsstufe ansteuerbar |
Verbindungsmöglichkeiten Microcontroller
| Identifikationstyp | Bermerkung zur Kombination |
|---|---|
| Barcode | Wenn die Protokolle bekannt sind, kann diese Identifikation implementiert werden. |
| 2D-Code | Wenn die Protokolle bekannt sind, kann diese Identifikation implementiert werden. |
| RFID | Wenn die Protokolle bekannt sind, kann diese Identifikation implementiert werden. |
| Magnetisch | Wenn die Protokolle bekannt sind, kann diese Identifikation implementiert werden. |
| Bildverarbeitung | Wenn die Protokolle bekannt sind, kann diese Identifikation implementiert werden. |
| Elektro-Mechanisch | Wenn die Protokolle bekannt sind, kann diese Identifikation implementiert werden. Kann auch einfach über die digitalen Eingängen abgefragt werden. Mit einer Look-up-Tabelle können die Bitkombinationen definiert werden. |
Verbindungsmöglichkeiten Microcontroller
| Kommunikationstyp | Bemerkung zur Kombination |
|---|---|
| ASI | |
| CAN | Wenn die Protokolle bekannt sind, kann es implementiert werden. |
| Profibus | Kann implementiert werden. Geschwindigkeit des Prozessors muss allerdings grösser als die Bitrate des Profibuses (12Mb/s) sein. |
| Industrial Ethernet / Profinet | Über Ethernet-Schnittstellen implementierbar |