Elektro-Mechanisch
Grundeigenschaften
Elektromechanische Identifikationsprinzipien arbeiten in praktisch allen Fällen nicht berührungslos. Denn genau durch die Berührung oder Betätigung eines elektromechanischen Elementes, wird eine Information übertragen.
Die Information kann in Form eines einfachen elektrischen Widerstandes, eines Magnetfeldes oder einer Lichtquelle auftreten und in Form einer definierten Bitkombination oder sogar eines Protokolls übertragen und entschlüsselt werden.
Die trivialste Form einer Identifikationsmaschine ist ein elektrischer Taster.
Bauformen
Die Bauform eines Identifikationssystem hängt sehr stark von der Anwendung und vom Integrierungsgrad ab.
Aufbau und Funktionsweise
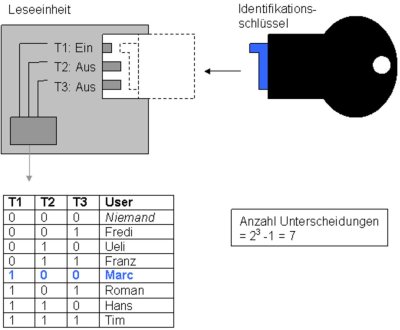
Bitkombination:
Mit einer einfachen Bitkombination lassen sich [2(Anzahl Bit) -1] verschiedene User oder Geräte identifizieren. Die Informationsübertragung für die Bitkombination kann mit einfachen Tastern erfolgen. Das untenstehende Beispiel zeigt auf, wie eine Identifikation mit 3 Tastern aussehen könnte.
 {.imgcenter}
{.imgcenter}
Im Endeffekt geht es bei diesem Prinzip darum, je nach Schlüssel oder User, eine bestimmte Ein-Aus-Kombination der Bits zu erzeugen. Dies kann beispielsweise auch durch magnetische oder optische Taster erfolgen. Letztere könnten auch als berührungslose Identifikationsprinzipien klassifiziert werden.
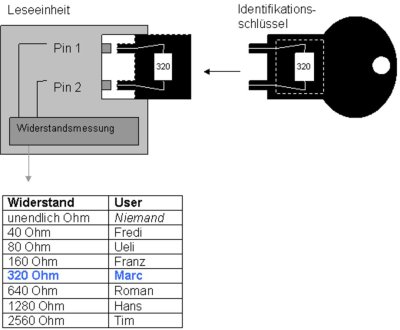
Widerstandsform:
Bei dieser Bauform ist ein elektrischer Widerstand das Unterscheidungsmerkmal der User. Jeder Identifikationsschlüssel hat einen bestimmten Widerstandswert. Beim Identifikationsprozess wird über elektrische Kontakte dieser Widerstandswert gemessen. In einer User-Tabelle ist der User dem Widerstandswert zugeordnet.
Das System hat aber seine Tücken. Zum Beispiel könnten die elektrischen Kontakte für die Widerstandsmessung verschmutzt sein. Das Messergebnis würde um einen Offset daneben liegen. Das gleiche geschieht bei grossen Temperaturänderungen. Solche Fehlerquellen können umgangen werden, indem eine Widerstandsdifferenz von zweien Widerständen auf dem gleichen Schlüssel gemessen wird. Jegliche Einflüsse von Aussen werden durch die Differenzbildung herausgerechnet.
 {.imgcenter}
{.imgcenter}
Protokoll:
Ausgefeilte Identifikationsprinzipien finden ihre Anwendung zum Beispiel bei Sicherheits-Schlosssystemen. Der Schlüssel ist mit einem Chip ausgerüstet. Im Drehknauf ist ein weiterer Chip mit einer Stromversorgung integriert. Mit diesem Prinzip überprüft sowohl die gewöhnlich Schlüsselmechanik das Zutrittsrecht, als auch der Identifikationschip, der die Zutrittsrechte für den jeweiligen Anwender auch auf bestimmte Zeitfenster einschränken kann. Es besteht auch die Möglichkeit den ganzen Datenverkehr zu protokollieren.
 {.imgcenter}
{.imgcenter}
Bildquelle: www.keso.ch
Kenngrössen
Anzahl erkennbare Objekte
Art der Informationsübertragung
Zuverlässigkeit
Ansteuerung
Ein elektromechanisches Identifikationssystem (Leseeinheit) benötigt meistens eine Hilfsenergie. Der Identifikationsschlüssel hingegen ist passiv. Die Ansteuerung selbst ist von Fall zu Fall sehr unterschiedlich und kann nicht allgemein beschrieben werden.
Anwendungsgebiete
Gebäudetechnik, z.B. Hoteltüren
Sicherheitstechnik
Automobilindustrie
In Geräten mit auswechselbaren Elementen wie Kamera und Objektiv
Medizinalgeräte
Verbindungsmöglichkeiten Elektromechanische Identifikation
| Sensortyp | Bemerkung zur Kombination |
|---|---|
| Kapazitiv | Zurzeit keine direkte Kombination bekannt |
| Induktiv | Zurzeit keine direkte Kombination bekannt |
| Magnetostriktiv | Zurzeit keine direkte Kombination bekannt |
| Piezo | Zurzeit keine direkte Kombination bekannt |
| Potentiometrisch | Zurzeit keine direkte Kombination bekannt |
| DMS | Zurzeit keine direkte Kombination bekannt |
| Fotoelektrisch | Zurzeit keine direkte Kombination bekannt |
| Ultraschall | Zurzeit keine direkte Kombination bekannt |
| Magnetisch | Zurzeit keine direkte Kombination bekannt |
Verbindungsmöglichkeiten Elektromechanische Identifikation
| Aktortyp | Bemerkung zur Kombination |
|---|---|
| Magnetostriktiv | Zurzeit keine direkte Kombination bekannt |
| Piezo | Zurzeit keine direkte Kombination bekannt |
| Synchronmotor | Zurzeit keine direkte Kombination bekannt |
| Asynchronmotor | Zurzeit keine direkte Kombination bekannt |
| Schrittmotor | Zurzeit keine direkte Kombination bekannt |
| Linearmotor | Zurzeit keine direkte Kombination bekannt |
| Tauchspulenmotor | Zurzeit keine direkte Kombination bekannt |
| Smart-Materials | Zurzeit keine direkte Kombination bekannt |
Verbindungsmöglichkeiten Elektromechanische Identifikation
| Controllertyp | Bemerkung zur Kombination |
|---|---|
| ASIC | Als Funktion vollständig integrierbar |
| SPS | Über entsprechendes Funktionsmodul ausführbar. In vereinfachter Form auch direkt über die Eingänge der SPS realisierbar. |
| Prozessrechner | Wird ein entsprechendes Funktionsmodul auf dem Markt angeboten, wäre eine Identifikation dieser Art durchaus realisierbar. In vereinfachter Form auch direkt über die Eingänge des Rechners realisierbar. |
| Microcontroller | Als Funktion vollständig integrierbar |
| Industrie-PC | Würde ein entsprechendes Funktionsmodul auf dem Markt angeboten, wäre eine Identifikation dieser Art durchaus realisierbar. In vereinfachter Form auch über eine digitale I/O-Karte am PC realisierbar. |
Verbindungsmöglichkeiten Elektromechanische Identifikation
| Kommunikationstyp | Bemerkung zur Kombination |
|---|---|
| ASI | Zurzeit keine direkte Kombination bekannt. Das AS-Interface wurde für binäre Sensoren/Aktoren entwickelt und ist deshalb weniger für die allgemeine elektromechanische Identifikation geeignet. |
| CAN | Wird ein entsprechendes Modul für das Einlesen der Daten einer elektromechanischen Identifikationseinheit angeboten, ist eine Übertragung via CAN-Bus machbar. |
| Profibus | Wird ein entsprechendes Modul für das Einlesen der Daten einer elektromechanischen Identifikationseinheit angeboten, ist eine Übertragung via Profibus-Bus machbar. |
| Industrial Ethernet / Profinet | Wird ein entsprechendes Modul für das Einlesen der Daten einer elektromechanischen Identifikationseinheit angeboten, ist eine Übertragung via Profibus-Bus machbar. |