Allgemein
Einführung
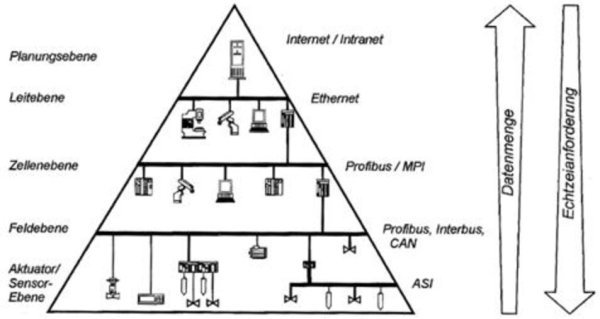
Zuerst wollen wir uns die Frage stellen was ein Bussystem überhaupt ist und wodurch es sich von anderen Netzwerktopologien unterscheidet. Als Bussystem bezeichnet man die Anordnung mehrerer Teilnehmer an eine gemeinsam genutzte Leitung, die sogenannt Busleitung. Ein Busteilnehmer kann ein Mikrokontrollersystem (z.B. SPS) sein oder auch ein Sensor oder Aktor. Alle diese Teilnehmer werden nun an eine gemeinsame Busleitung angeschlossen, um Informationen untereinander auszutauschen. Der grosse Vorteil einer Busstruktur ist, dass viel weniger Verkabelungsaufwand betrieben werden muss als z.B. bei einer Sternform( Parallelverdrahtung). Bei komplexeren Systemen werden die einzelnen Teilsysteme in Hierarchieebenen aufgeteilt. Jeder Hierarchieebene kann eine weitere Ebene zugeteilt werden, welche den gewünschten Systemanforderungen entspricht. So entsteht eine komplexe Netzstruktur, die in mehrere Teilsysteme (Hierarchieebenen) unterteilt werden kann, da nicht alle Kommunikationsaufgaben in einer Hierarchieebene gelöst werden können. Das nachfolgende Bild soll dies verdeutlichen.
 {.imgcenter}
{.imgcenter}
Die Kommunikation in der untersten Ebene soll hohen Echtzeitanforderungen entsprechen, während die oberste Ebene mit der Kommunikation von grossen Datenmengen und zeitunkritischen Rechenaufgaben besteht.
Prinzipien
Bussystemprinzipien
Jede Hierarchieebene kann nun mit einer anderen Ebene kommunizieren. Je nach Ebene werden unterschiedliche Bussysteme angeboten, die den Anforderungen der Hierarchieebene entsprechen und daraus ausgelegt sind. Die Aufgaben der einzelnen Hierarchieebenen sollen in der folgenden Tabelle gezeigt werden:
| Hierarchieebene | Beschreibung | Bussysteme |
|---|---|---|
| Planungsebene | In dieser Ebene werden zeitunkritische Rechenaufgaben ausgeführt und grosse Datenmengen über längere Distanzen übermittelt. Diese Ebene dient für die Auswertung der Produktionsprozesse. | Internet, Intranet |
| Leitebene | Die Leitebene dient zur Koordinierung der Zellenebene. Hier werden die Auftrags- und Programmdaten für die Zellenebene bereitgestellt. Auch diese Ebene ist für zeitunkritische Aufgaben konzipiert. | Ethernet, Industrial Ethernet / Profinet |
| Zellenebene | Auf dieser Ebene kommunizieren intelligente Rechner (z.B. SPS) miteinander, um einzelne Fertigungszellen zu verbinden. | Profibus |
| Feldebene | Hier werden zeitkritische Aufgaben ausgeführt. Die Feldebene besteht aus programmierbaren Geräten wie SPS oder Industrierechner. Daten von der Aktor-/Sensorebene werden ausgewertet. | CAN, Profibus |
| Aktor-/ Sensorebene | Es werden nur kleine Datenmengen übertragen. Die Reaktionszeit steht im Vordergrund. D.h. die Aktor-/Sensordaten müssen schnell Aktualisiert werden können. Mit dieser Ebene ist es möglich, einfache Feldgeräte wie Sensoren/Aktoren mit der Feldebene zu verbinden. | ASI |
Feldbussysteme
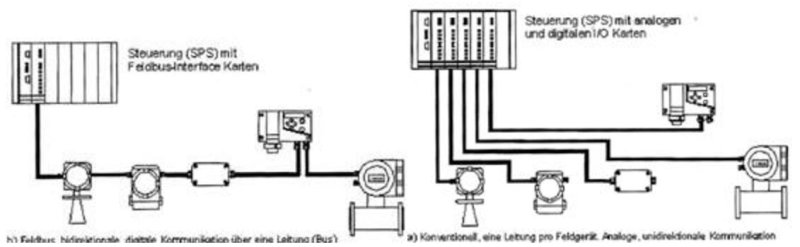
Ein Feldbussystem ist ein Datennetzwerk auf der industriellen Feldebene. An diesem Netzwerk können über Interface und I/O Module Sensoren, Motor, Regler usw. mit einer SPS oder einem Industrie PC verbunden werden.
Prozesse, Anlagen und Produktionsvorgänge lassen sich mittels Feldbustechnik leichter überwachen, warten und Fehler beheben. Daten und Informationen können direkt an die Prozessleitebene übertragen werden.
Es gibt einige Vorteile bzw. Nachteile, um ein Feldbussystem einer normalen Parallelverdrahtung vorzuziehen. Das Feldbussystem lohnt sich erst bei grösseren Systemen, die mehrere Sensoren und Aktoren enthalten.
 {.imgcenter}
{.imgcenter}
Vorteile eines Feldbussystems
- Geringer Verkabelungsaufwand
- Parametrierung von Feldgeräten im Betrieb
- Digitalisierung und Vorverarbeitung analoger Signale im Feldgerät und damit besserer Schutz vor Verfälschung
- Zentrale Überwachung von Prozessen
- Transparente Steuerungsstrukturen
Nachteile eines Feldbussystems
- Teurere Feldgeräte
- Komplexere Handhabung
- Expertenwissen für den Betrieb notwendig
Buszugriffsverfahren
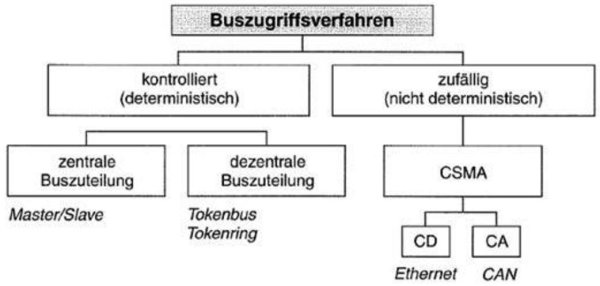
Fast alle Netzwerktopologien setzten voraus, dass zu einem bestimmten Zeitpunkt nur ein Sender auf das gemeinsame Trägermedium zugreift. Im folgenden sollen verschiedene Möglichkeiten, diesen Buszugriff zu regeln, vorgestellt werden. Dabei unterscheidet man, wie in der folgenden Abbildung dargestellt, zwischen kontrollierten und zufälligen Buszugriffsverfahren.
 {.imgcenter}
{.imgcenter}
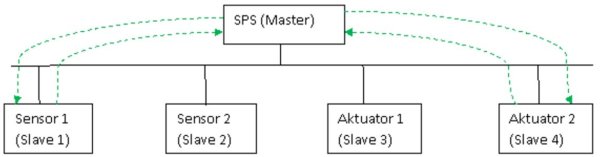
Master/Slave-Verfahren
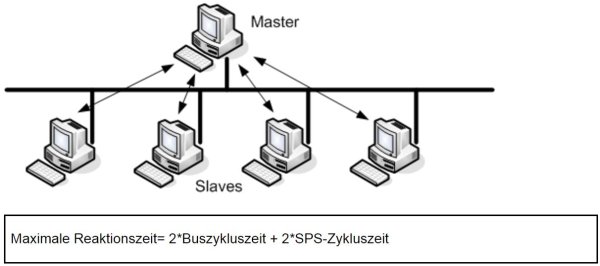
Bei diesem Verfahren stellt die Bussteuereinheit, der sog. Master, die Verbindung zum passiven Teilnehmer, dem Slave, her. Dieser antwortet auf eine Datenanforderung des Masters unmittlebar (immediate response).
Der Master stellt in der Regel zyklisch die Verbindung zu jedem Slave her (polling). Damit ist im Master immer ein aktuelles Abbild des zu steuernden Prozesses abgelegt.
Problematisch können die Zeiten sein, die benötigt werden, wenn Daten zwischen zwei Slaves ausgetauscht werden müssen. In diesem Fall schickt der Master eine Datenanforderung an den signalgebenden Slave, woraufhin dieser unmittelbar antwortet. Diese Information muss im Master bzw. in der Steuerung verarbeitet und an den empfangenden Slave übertragen werden.
Das bedeutet, dass im Extremfall die Zykluszeit sowohl für die Datenanforderung als auch für die Sendung benötigt wird. Zusätzlich muss die Bearbeitungszeit durch den Master/die Steuerung berücksichtigt werden. Damit liegt die Zeitdauer dieser Datenübertragung u.U. um ein Vielfaches über der Zykluszeit.
 {.imgcenter}
{.imgcenter}
In dieser Gleichung sind z.B. die mechanischen Verzögerungszeiten eines Ventils nicht berücksichtigt und damit noch hinzuzuzählen.
 {.imgcenter}
{.imgcenter}
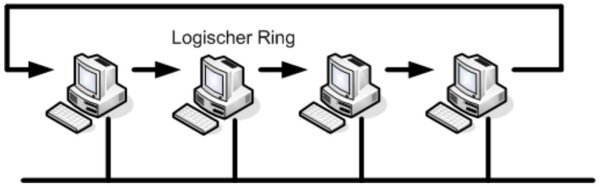
Token-Prinzip
Bei Systemen, die nach dem Token-Prinzip arbeiten, sind grundsätzlich alle Teilnehmer in der Lage, die Kommunikationssteuerung zu übernehmen. Die Berechtigung auf den Bus zugreifen zu dürfen und damit die Kommunikationssteuerung zu übernehmen, wird durch ein spezielles Zeichen oder eine spezielle Nachricht, dem sog. Token, genau einem der Teilnehmer zugeteilt. Hat dieser Teilnehmer seine Datenübertragung abgeschlossen, wird das Token an den nächsten Teilnehmer weitergereicht. Da die Zeitdauer des Token-Besitzes zeitlich limitiert ist, sind auch diese Zugriffsverfahren echtzeitfähig.
 {.imgcenter}
{.imgcenter}
CSMA
Der Kürzel CSMA steht für Carrier Sense Multiple Access. Dabei hört ein sendewilliger Teilnehmer die gemeinsame Busleitung ab (Carrier Sense) und sendet, falls diese nicht belegt ist. Sollte die Busleitung durch einen anderen Teilnehmer belegt sein, stellt der sendewillige Teilnehmer seinen Sendewunsch zurück und versucht, zu einem späteren Zeitpunkt erneut die Daten zu übertragen (Multiple Access). Da ein Teilnehmer nur dann auf das Trägermedium zugreift, wenn er Daten übertragen will, kann im voraus nicht bestimmt werden, welcher Teilnehmer sendet. Damit handelt es sich um ein zufälliges Buszugriffsverfahren. Da auch nicht sichergestellt ist, dass die Busleitung frei ist, wenn ein Sendewunsch besteht, kann auch keine maximale Zeit garantiert werden, in der die Daten übertragen werden. Damit ist dieses Verfahren nicht echtzeitfähig.
Grundprinzipien für Netzwerke
Zweipunktverbindungen
Werden mehrere Teilnehmer mit zweipunktverbindungen verknüpft, entsteht ein vermaschtes Netz. In dieser Topologie ist jeder Teilnehmer mit den anderen Teilnehmern verbunden. Daraus resultiert, dass die Kosten einer solchen Topologie sehr hoch sind. Im Falle eines Fehlers würde jedoch nur ein Teilnehmer bzw. nur ein Kommunikationskanal ausfallen, was die Fehlerdiagnose sehr einfach macht.
 {.imgcenter}
{.imgcenter}
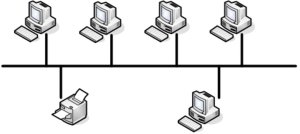
Bus-Struktur
Bei der Bus-Struktur, auch Linienstruktur genannt, kommunizieren alle Teilnehmer über eine gemeinsame Leitung.
Die Anbindung der Teilnehmer an das Buskabel geschieht über kurze Stichleitungen (Dropkabel). Dadurch wird der Kabelaufwand, verglichen mit dem vermaschten Netz, erheblich reduziert. Jeder Teilnehmer benötigt hier nur noch eine Schnittstelle, um mit einem beliebigen, an dem Bus angeschlossenen Teilnehmer kommunizieren zu können. Hier entsteht allerdings das Problem, dass immer nur ein Teilnehmer zu einem bestimmten Zeitpunkt senden darf. Damit werden Regeln notwendig, die das Zugriffsrecht auf den Bus festlegen, sog. Buszugriffsverfahren.
 {.imgcenter}
{.imgcenter}
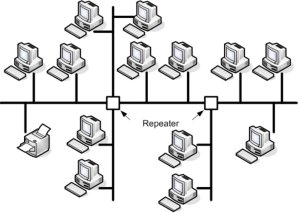
Baumstruktur Bei der Baumstruktur handelt es sich um eine Weiterentwicklung der Linienstruktur. Mit dieser Topologie sind grössere Flächen als bei der Bustopologie vernetzbar.
 {.imgcenter}
{.imgcenter}
Ringstruktur
Mittels mehrerer Zweipunktverbindungen wird bei dieser Struktur ein physikalischer Ring aufgebaut.Dabei wird die zu übertragende Information von Teilnehmer zu Teilnehmer weitergeleitet. Auch hier muss mittels Buszugriffsverfahren sichergestellt sein, dass nur ein Teilnehmer zu einem bestimmten Zeitpunkt sendet.
 {.imgcenter}
{.imgcenter}
Sternstruktur
Hier ist die Zentralstation mittels Zweipunktverbindung mit jedem anderen Teilnehmer verbunden. Es existieren zwei Möglichkeiten, die Zentralstation zu realisieren.
 {.imgcenter}
{.imgcenter}
Sternkoppler (Hub)
Die Aufgabe des Sternkopplers ist es, die Signale ausschliesslich vom Sender zum richtigen Empfänger weiterzuleiten.
Intelligenz in der Zentralstation
In der Zentralstation wird Intelligenz implementiert. Damit könnte diese Station die Steuerung des gesamten Kommunikationsprozesses übernehmen. Die Zentralstation würde somit von allen anderen Teilnehmern vorgezogen.
Anforderungen und Einschränkungen
Es gibt gewisse Anforderungen und Beschränkungen, die je nach Bussystem variieren können.
| Anforderungen | Beschränkungen | |
|---|---|---|
| AS-Interface | Echtzeitanforderungen | Hauptsächlich für binäre Signale |
| CAN-Bus | Echtzeitanforderungen | Wenige Standardisierungen |
| Profibus | Echtzeitanforderungen | Aufbau nur in Linienstruktur |
| Industrial Ethernet | Grosse Datenmengen | Keine Echtzeitfähigkeit |
Kenngrössen
Es gibt einige Kennwerte, die bei Bussystemen angegeben werden können. Hier eine Auswahl der wichtigsten Kenngrössen:
Max. Teilnehmer:
Gibt an, wie viele Teilnehmer maximal an den Bus angeschlossen werden dürfen.
Übertragungsrate:
Aus diesem Wert kann die Geschwindigkeit herausgelesen werden, wie schnell Daten übertragen werden. Wird in Bd (Baudrate) angegeben. Wenn 1 Symbol pro Sekunde übertragen wird entspricht dies einem Baud.
Leitungslänge:
Gibt an, wie goss die max. Leitungslänge des Buskabels beträgt.
Telegrammformat:
Die Informationen werden in sogenannten Telegrammen übertragen. Ein Telegramm besteht aus mehreren Bits und kann je nach Telegrammformat unterschiedlich lang sein. Auch der Aufbau eines Telegramms kann von Format zu Format verschieden sein.
Datensicherung:
Mit einer Fehlerkorrektur ist es möglich, fehlerhaft übertragene Daten bis zu einem gewissen Limit auszukorrigieren. Oft wird ein Paritätsbit am Schluss einer Nachricht übertragen.
Literaturhinweise
- Berthold Heinrich, Mechatronik, ISBN3-528-03957-4
- Gerhard Schnell, Bussysteme in der Automatisierungs- und Prozesstechnik, ISBN 3-528-46569-7