Tauchspulen-Motor
Grundeigenschaften
Der Tauchspulenmotor gehört zu den Direktantrieben und ist die klassische Umsetzung der Lorentzkraft. Das Prinzip der Tauchspule, wird in jedem Lautsprecher oder Mikrofon verwendet, daher auch der Name Voice Coil. Beim Lautsprecher treibt die Tauchspule die Lautsprechermembrane an. Da der Strom durch die Spule proportional zur erzeugten Kraft steht und für die Auslenkung ein einfacher Spannungswert genügt, ist die Tauchspule, elektrisch gesehen, die einfachste Variante eine direkte lineare Bewegung zu erzeugen.
Lorenzkraft:
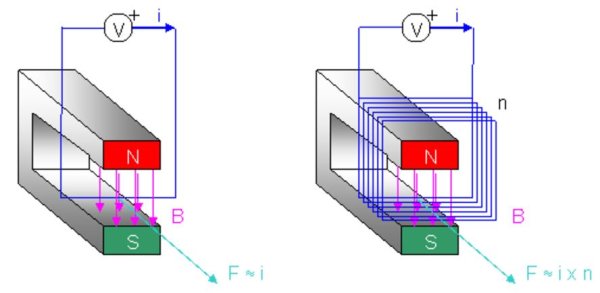
Wird eine Kraft F aufgewendet um ein stück Draht durch ein magnetisches Feld zu führen, so wird eine Spannung u im Draht induziert. Dieses Gesetz lässt sich nach dem Generator-Motor-Prinzip auch Rückwerts anwenden: solange ein stromdurchflossener Draht in einem magnetischen Feld steht, erfährt der Draht eine mechanische Kraft F in die unten eingezeichnete Richtung.
Die Lorenzkraft F berechnet sich aus dem Strom i, der magnetischen Flussdichte B und der Länge l des Drahtes (welcher direkt vom magnetischen Feld durchflossen wird)
mit folgender Formel.
[ F = i \cdot |l| \cdot |B| \cdot sin(a) ]
Die Variable a bezeichnet den Winkel zwischen den Vektoren des magnetischen Feldes und des Drahtes (in diesem Beispiel sin(90°)=1). Dieses Grundgesetz wird verstärkt, indem statt einem Draht eine ganze Spule mit n Windungen ausgenutzt wird. Jede Windung der Spule wird nun vom magnetischen Feld durchflossen und verstärkt somit die Kraft F um das n-fache.
 {.imgcenter}
{.imgcenter}
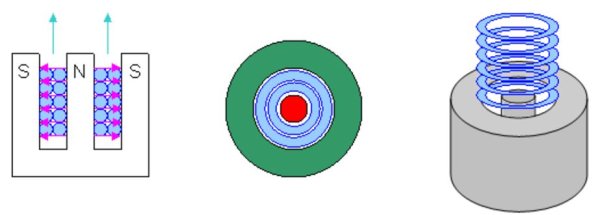
Um eine möglichst grosse Kraftausbeute zu erlangen, wird in der Praxis bei den Aktuatoren ein Topfmagnet verwendet. Dieser umschliesst für die Krafterzeugung die ganze Spulenlänge.
 {.imgcenter}
{.imgcenter}
Bauformen
 {.imgcenter}
{.imgcenter}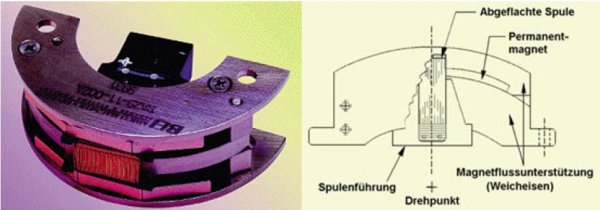 {.imgcenter}
{.imgcenter}Aufbau und Funktionsweise
Schaltungsarten
Die Tauchspulen sind ganz einfache Aktoren und werden als solches auch nur mit einer Schaltungsart betrieben.
Kenngrössen
Kraftkonstante KNI [N / Ampere-turn]:
Gibt die entwickelte Kraft pro Spulenerregung in Ampere-Windungen an. Die abzugebende Kraft des Voice Coil Motors errechnet sich aus dem Produkt der Kraftkonstante und der Spulenerregung in Ampere-Windungen
Linearer Bereich [mm]:
Gibt den Arbeitsbereich an, bei dem die mögliche Krafterzeugung mindestens 90% der Maximalkraft beträgt.
Thermische Konstante Rth [°C / W]:
Die thermische Konstante steht für den Temperaturanstieg der Spulenwicklung pro Erregerleistung in Watt. Diese Konstante setzt eine ausreichende Temperaturabführung beim Magnettopf voraus (z.B. Montage auf Aluminiumblock).
Max Temperatur Tmax [°C]:
Maximal zulässige Spulentemperatur. Beim Überschreiten der maximalen Temperatur kann die Isolation des Drahtens schmelzen. Dadurch entsteht ein Windungsschluss.
Dauerkraft F100 [N]:
Die Dauerkraft steht für die maximale Auslenk-Kraft bei Dauererregung (Nennleistung), bei Berücksichtigung der zulässigen Temperatur.
Spitzenkraft Fmax:
Die Spitzenkraft gibt die maximale Auslenkkraft an. Die zeitliche Dauer der Spitzenkraft ist beschränkt und wird meistens mit einer separaten Angabe vermerkt.
Back-EMF-Konstante Kv [V / m/s]:
Da die Tauchspule sowohl ein Motor als auch ein Generator ist, treten beispielsweise in dynamischen Fällen im Motorbetrieb entgegenwirkende Generatorphänomene auf.
Bei einem Dynamo ist die induzierte Spannungsamplitude proportional zur Drehzahl. Bei der Tauchspule ist es die Geschwindigkeit des Drahtes durch das Magnetfeld. Bewegt sich nun die Spule bei einer schnellen Anwendung mit hoher Geschwindigkeit durch das Magnetfeld, induziert diese eine Spannung, die der Ansteuer-Spannung entgegenwirkt. Dies führt zu einem kleineren Potentialunterschied in der Spulenwicklung. Somit fliesst auch ein kleinerer Strom, was einen Krafteinbruch zur Folge hat.
Spannung U [V]:
Gibt die Nenn-Spannung an.
Strom I [A]:
Gibt den Nenn-Strom an.
Induktivität L [mH]:
Gibt die Induktivität der Spule an. Wegen der Induktivität verhält sich die Spule bei schnellen Spannungswechseln wie ein Trafo. Dabei entstehen bei den Wechseln Spitzenspannungen.
Wicklungswiderstand R [Ohm]:
Gibt den ohmschen Widerstand der Spule an. Dieser führt zur Erwärmung der Spule bei.
Leistung PP @ FP (I2R) [W]:
Gibt die Nenn-Leistung an. Diese berechnet sich aus I2 * R
Gewicht Spule WC [g]:
Da in den meisten Fällen die Spule als beweglicher Teil eingesetzt wird, gibt der Hersteller Angaben zu deren Gewicht an. Bei dynamischen Anwendungen, bei grossen Beschleunigungen kommt dieser Wert zum Tragen.
Prinzipielle Gleichungen:
Gegenspannung:
[
V{g} = K{v} \cdot v, \space v[{m \over s}]
]
Kraft (bei konstantem Strom):
[ F = KNI \cdot N \cdot I ]
Kraft (bei konstanter Spannung):
[ F = KNI \cdot N \cdot {[U - (K_{v} \cdot v)] \over R} ]
Geschwindigkeit:
[ v = {[{(F \cdot R) \over KNI \cdot N} - U] \over K_v} ]
- Wege von ca. 0,5 bis 100 mm (linear) bis +/- 60° (bogenförmig)
- hohe Wiederhol- und Positioniergenauigkeit (µm-genau, nur sensorabhängig)
- Kraft bis 2.000 N linear, bis 20 Nm rotierend
- sehr hohe Beschleunigungswerte, z.B. 20 bis 50g Langhub und bis zu 300 g Kurzhub
- Frequenz bis ca. 400 Hz je nach bewegter Masse
Ansteuerung
Die Ansteuerung von Tauchspulen erfordert lediglich einen Spannungswert. Somit können Tauchspulen direkt mit allen Geräten betrieben werden, die als Output eine Spannung liefern. Beispiele dafür sind Batterien, Netzgeräte, Funktionsgeneratoren, Soundkarten, etc. Dabei muss hauptsächlich auf die maximalen Strom- und Spannungswerten Rücksicht genommen werden. Theoretisch kann als Leistungstreiber für eine Tauchspule wie im Falle eines Lautsprechers ein leistungsstarker Audioverstärker verwendet werden.
Anwendungsgebiete
Da die Tauchspulenmotoren zu den Direktantrieben gehören, keine Abnutzung aufweisen, sehr genau sind und auch sehr leise arbeiten, werden folgende Anwendungen eingesetzt:
Halbleiterfertigung Elektronik
Biomedizin, Life-Science
Reinraumanwendungen
Test- und Prüfautomaten für wissenschaftliche Zwecke
Wissenschaft, Forschung und Labor
Rundschalttische und Spezialmaschinen
Druck- und Durchflussregelung
Optische Systeme (Fokussierung)
Lichtstrahlsteuerung/-stabilisierung
Beatmungsgeräte
Fokussierung in der Endoskopie
Antriebe für XY-Tische
Verbindungsmöglichkeiten Tauchspulen-Motor
| Sensortyp | Bemerkung zur Kombination |
|---|---|
| Kapazitiv | Kann als Weggeber verwendet werden. Dabei muss auf den nichtlinearen Zusammenhang zwischen Signal und Abstand geachtet werden. |
| Induktiv | Kann als Weggeber verwendet werden. Dabei muss auf den nichtlinearen Zusammenhang zwischen Signal und Abstand charakterisiert werden. |
| Magnetostriktiv | Eignet sich als absoluter Weggeber. |
| Piezo | Nicht geeignet. |
| Potentiometrisch | Eignet sich als absoluter Weggeber. |
| DMS | Nicht geeignet. |
| Fotoelektrisch | Eignet sich als absoluter Weggeber oder für Endanschlagsfahrten. |
| Ultraschall | Nicht geeignet. |
| Magnetisch | Kann je nach Bauform als relativer Weggeber dienen oder für Endanschlagsfahrten verwendet werden. |
Verbindungsmöglichkeiten Tauchspulen-Motor
| Controllertyp | Bemerkung zur Kombination |
|---|---|
| ASIC | Kann über eine Leistungselektronik oder Treiber angesteuert werden. |
| SPS | Eine Ansteuerung mittels SPS ist unüblich. |
| Prozessrechner | Kann über eine Leistungselektronik oder Treiber angesteuert werden. |
| Microcontroller | Kann über eine Leistungselektronik oder Treiber angesteuert werden. |
| Industrie-PC | Kann über eine Leistungselektronik oder Treiber angesteuert werden. |
Verbindungsmöglichkeiten Tauchspulen-Motor
| Identifikationstyp | Bermerkung zur Kombination |
|---|---|
| Barcode | Zurzeit keine Kombination bekannt |
| 2D-Code | Zurzeit keine Kombination bekannt |
| RFID | Zurzeit keine Kombination bekannt |
| Magnetisch | Zurzeit keine Kombination bekannt |
| Bildverarbeitung | Zurzeit keine Kombination bekannt |
| Elektro-Mechanisch | Zurzeit keine Kombination bekannt |
Verbindungsmöglichkeiten Tauchspulen-Motor
| Kommunikationstyp | Bemerkung zur Kombination |
|---|---|
| ASI | Kommuniziert in der Regel über den ASI-Bus mit einer SPS. Dabei werden hauptsächlich binäre und durch Erweiterungen auch analoge Werte übertragen. |
| CAN | Mit einer digitalen Schnittstelle können die Daten über einen CAN-Bus weitergeleitet werden. Somit bleiben grosse Kabelbäume erspart. |
| Profibus | Mit einer digitalen Schnittstelle können die Steuerdaten über einen Profibus weitergeleitet werden. Vor allem ürsprünglich analoge Signale können ohne Einflüsse wie Spannungsabfall oder Induzierte Spannungen über weite Distanzen trasportiert werden. |
| Industrial Ethernet / Profinet | Mit dem industrial Ethernet können Steuersignale über grosse Distanzen transportiert werden. Somit können Aktoren ferngesteuert und ferngewartet werden. |